この一連の出版物では、マイクロコントローラの制御下で最初のロボットを作成したストーリーと、プロセス全体で私が犯した間違いや脱落についてお話したいと思います。 ロボットのソフトウェア部分はまだ完了しておらず、機能の一部のみが実装されているとすぐに言いますが、バグと怠に苦しみ続けています。将来、私が念頭に置いているすべてを間違いなく完了します、厳密に判断しないでください。 私があなたに興味があるなら、お願いします。
パート1、デザイン 。
おそらく、それはすべて、自由時間をより生産的に過ごしたいという事実から始まったのでしょう。 ロボットを構築するという決定は非常に速く、揺るぎないものでした-私は常にロボット工学とさまざまなDIYのトピックに関する記事が大好きで、はんだごてを手に持って、マイクロコントローラについても聞きました。
まず
、将来の創造の
ために小さな技術プロジェクトを作成することにしました。
数時間の反射の後、ロボットのおおよその寸法図が作成され、主な設計要件が決定されました。
1)私は、2つの駆動輪と1つのスイベルでロボットを実行することにしました。
2)サイズの面では、彼は常に200x200 mm以内に収まることを望んでいました。
2)小型化のためのシャーシとしてプリント回路基板を使用することは良い考えのように思えました。
3)これらはすべて、通常のLi-Poバッテリー(壊れたヘリコプターがクローゼットに横たわっており、充電と同時にバッテリーを持っている)で駆動する必要があります。
それから
、ロボットが実行しなければならない機能を決定する番になりました:
-
次の行 ;
-
コンピューターからの無線データ交換と制御のためのインターフェース 。
-
障害物を自動的に識別し回避する能力 。
これで、将来のスカーフシャーシの概略図を作成することを考えることができます。 Altium Designerで回路を作成することにしました(P-CADとEagleは既に少し知っていたので、新しいパッケージを試してみたかったので)。
最初の1週間は、コンポーネントを決定し、Altiumaライブラリに入力しました。3Dモデルにあまり忙しくせず、全体の寸法を評価するために、そして審美的な感覚を喜ばないために、急いで作成しました。 ロボットに関する多くの記事やビデオを見たという事実により、上記の機能をすべて実行する要素ベースについてはほとんど質問がありませんでした。
-私は3-9Vを動力とする
モーターを選びました。中国ブランドの
N20ミニチュア+ホイールにはモーターが完全に付属しています。
-典型的な
L293Dでの エンジン管理 (最良の選択ではないかもしれませんが、購入は簡単でした)。
-
ラインセンサーには、安価な
TCRT5000が選択されました。
-有名な
BluetoothモジュールHC-05は
、コンピューターとのデータ交換を担当し
ます 。
-超音波距離計
HC-SR04に 障害物検出システムを実装したかったの
ですが、これは標準の
9gに搭載する予定でした
。 サーバー-デバイス
の脳も最も人気のあるものの中から選択され、
ATmega16Aになり、要件を完全に満たし、さらには過剰になりました。
-少し先を見て、回路の設計段階でも、
Nokia 5110からLCDモニター用のコネクターを回路に追加することで、コントローラーの空きピンを打つことにしたと言います。
ちなみに、車輪を見ると、明確に特別に作られた車輪の切り抜きを見ることができます。

Sparkfunは、光学式エンコーダーと同じホイールを選択したことで私の考えを確認しました。 それから、車輪の回転数(少なくとも近似値)を読み取るというアイデアを得ました。

しかし、別の車輪セットを購入しないでください、これは私たちのものではありません! エンコーダーの独自バージョンを作成することにしました。 キャリパーでホイールとモーターの周りをパフすると、スパークファンのスカーフを繰り返すことができないことに気付きました。 しかし、開発中に光学式エンコーダーを使用するのが不便な場合に思い浮かぶのは、磁石とホールセンサーです! ほぼ完璧な形状で、eBayで希土類磁石が見つかり、
そこでUS1881 ホールセンサーが注文され
ました 。
すべての電子周辺機器の接続と操作に関する多くの記事があります。 回路の供給部分の設計に疑問が生じました。 私が持っていた
バッテリーは、
7.4Vの電圧と
800mA / hの容量を持つ
Li-po 2S1Pでした 。 コントローラー、サーボ、ブルートゥースモジュール、および超音波センサーには5Vから電力を供給する必要があり、LCDモニターは一般的に穏やかで、3.3Vが期待されていましたが、バッテリーからモーターに直接電力を供給することは論理的でした。
そして、ここで私は回路とエンジニアが私を打ち負かすことができる最初の欠陥を作りました。 5V電源レギュレータを選択しても、すべての要素の消費量を詳細に計算せず、約300mAを計算しました。既存の
LT1763 5Vマイクロ回路は、
すでに長い間パントリーに
散らばっていて、ロボットにはんだ付けすることに熱心でした。 この
LT1763は、電圧降下が小さく、入力電圧が
1.8V〜20Vの 500mAの小型リニアレギュレータです。
さて、5Vで駆動される回路全体がどれだけ消費できるかを推定しましょう。 最大数を取る:
-データシートのMKコアは、16MHzからクロックされると15mAを消費するはずです。12MHzを使用しますが、MKが平均30mAを消費するという事実に焦点を当てます。
-Servaにはほとんど負荷がなく、理想的には150〜200mAを消費します。
-Logic L293Dには最大60mAが必要です。
-送信状態のBluetoothモジュールは10mA以下しか消費しません。
-ラインセンサーは合計で15〜20mAを消費する必要があります。
-測定状態15mAの超音波センサー;
-ディスプレイは、バックライトがあっても、40mAを超えてはいけません。
-ホールセンサーは10mAを消費します。
-さて、バッファーとサスペンダーの上に10mAを入れましょう。
その結果、約400mAが得られますが、すべての機器と最大消費電力が含まれているため、これはほとんどありません。 5V電源では、実際には300mAを超えてはならないと言います。 したがって、LT1763の選択は間違いとは言えませんが、いずれにせよ、ロボットの次のバージョンでは、LT1963または何らかの種類のDC-DCを配置した方が良いでしょう。
そのため、小さな回路を設計するのにさらに数日かかりました。
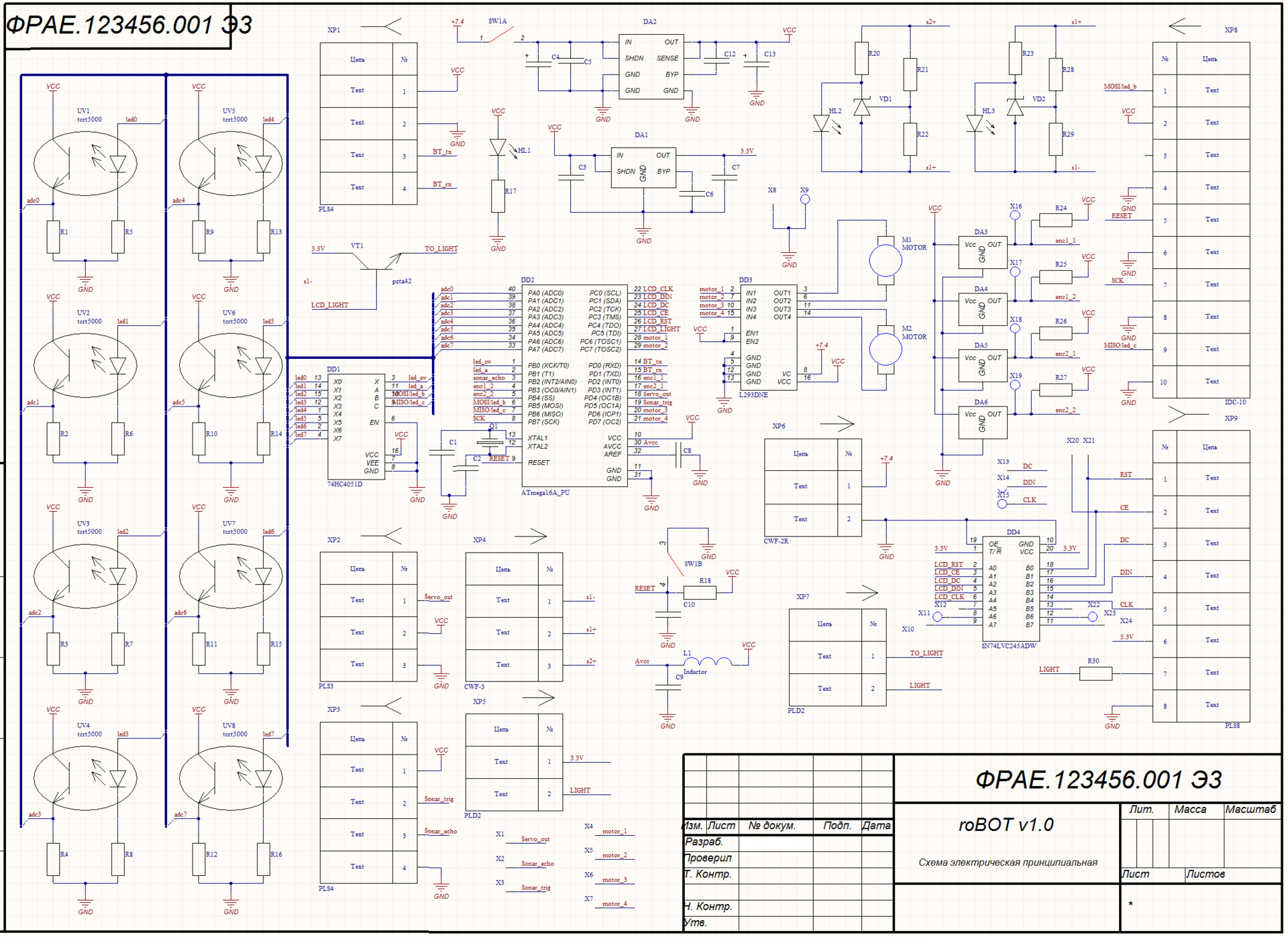
ご覧のとおり、8個のラインセンサーを使用し、それに応じてMKのADCの8チャンネルすべてを使用することにしました
。74HC4051Dのおかげで、センサーLEDを点灯するのに必要なピンの数
を減らしました。
モニターを操作する
ために、
SN74LVC245ADWバッファーが使用されました。これにより、電圧レベルの問題が解決されます。 これは、非常に低い電圧降下
LTC1844を備えた小型150mAリニアスタビライザーチップで駆動されます。 また、すべての消防士にLi-Poバッテリー放電センサーを追加しました。
次に、電子デバイスの製造における最も「労力のかかる」段階、つまりプリント基板の作成を待っていました。
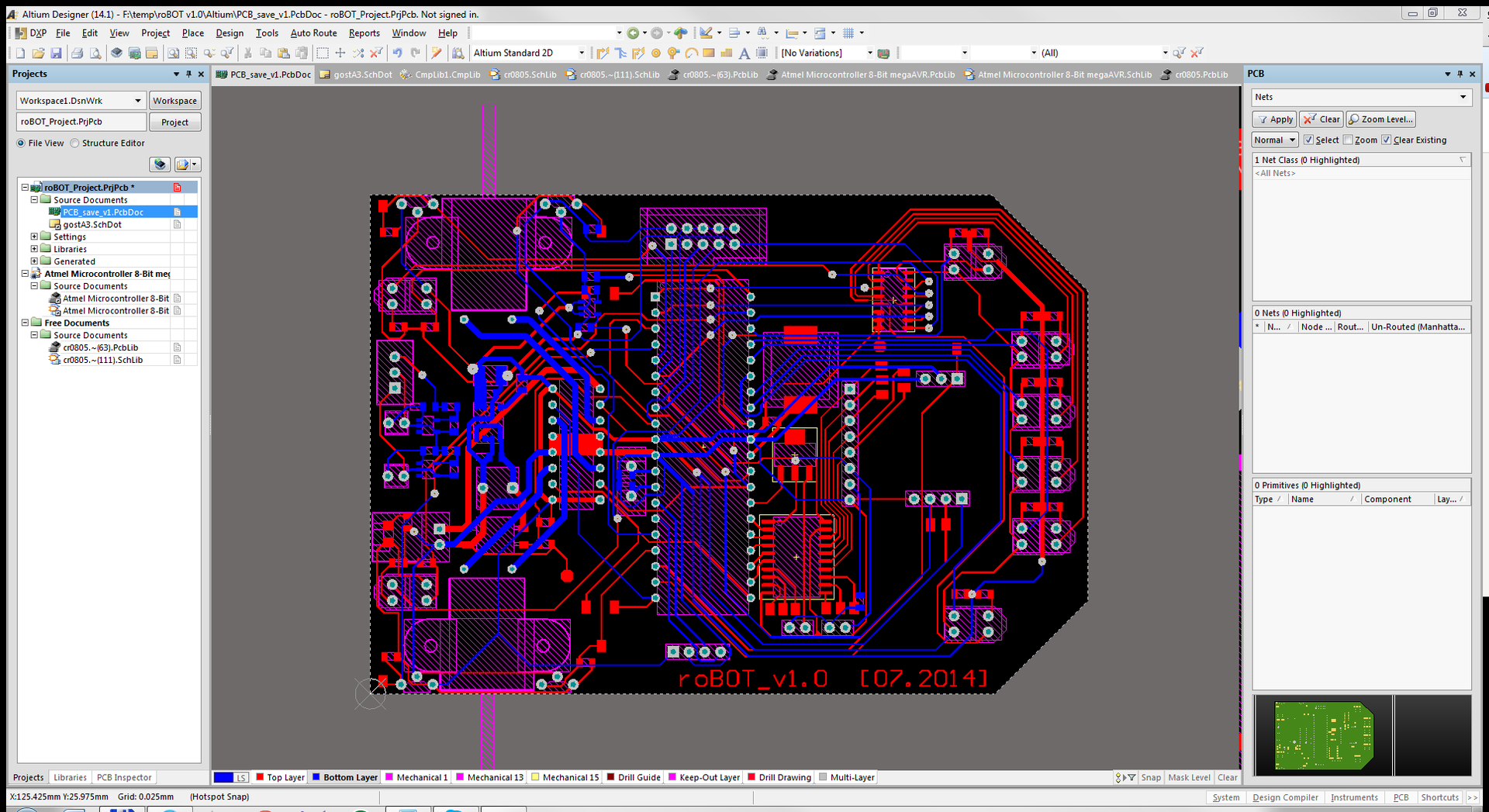
プリント基板上の散乱要素の数晩後、何かが生まれました:

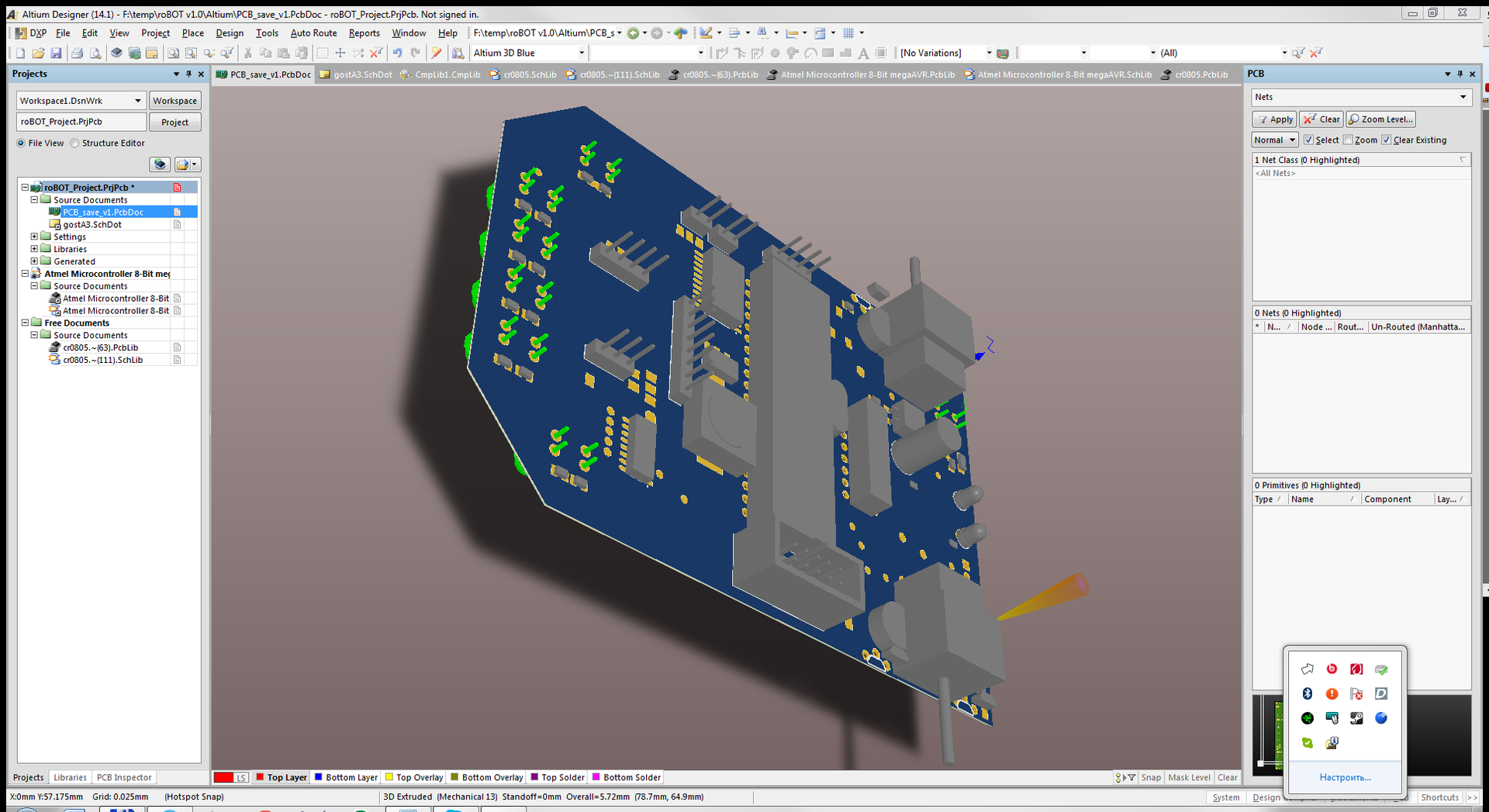
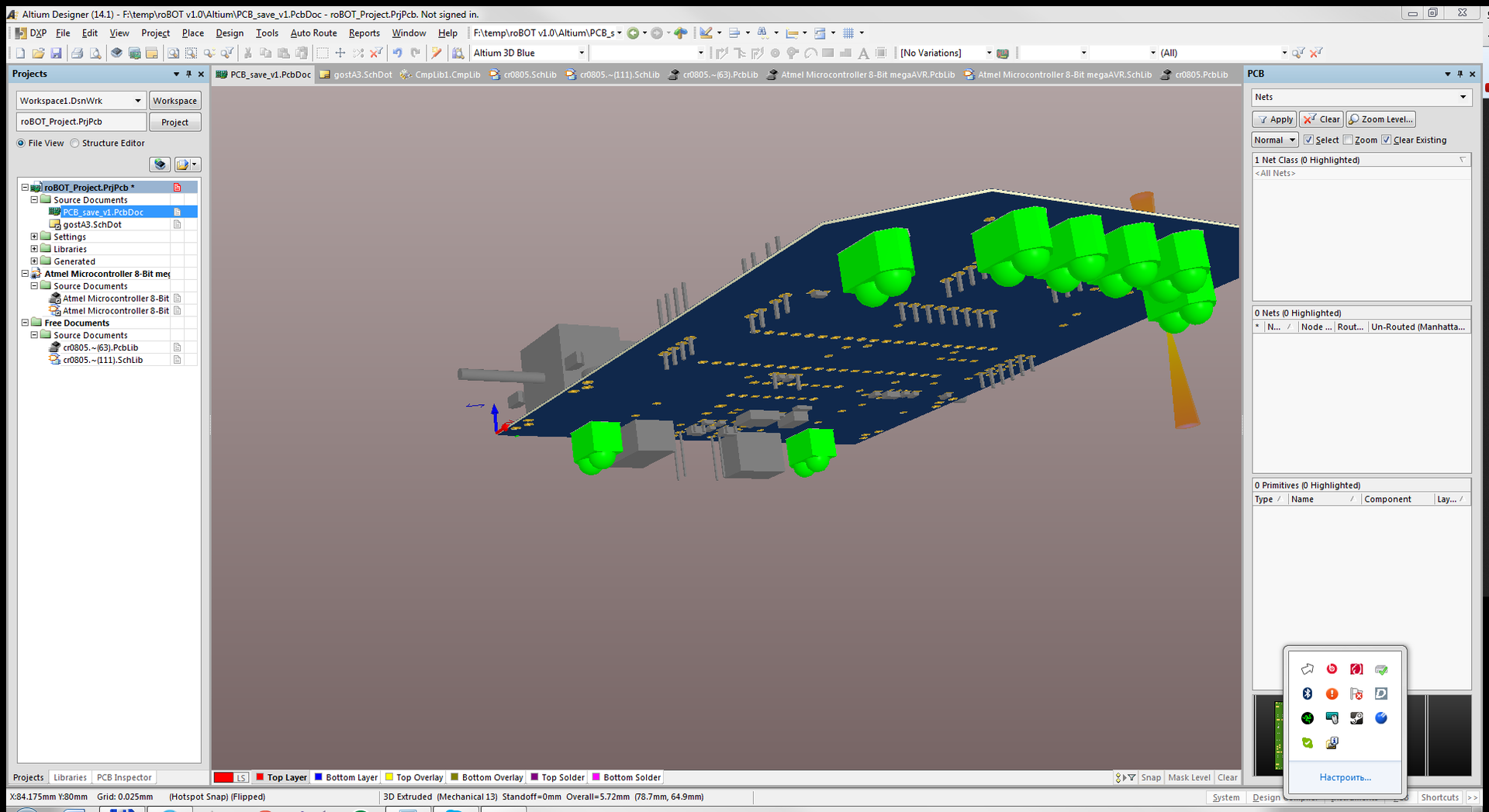
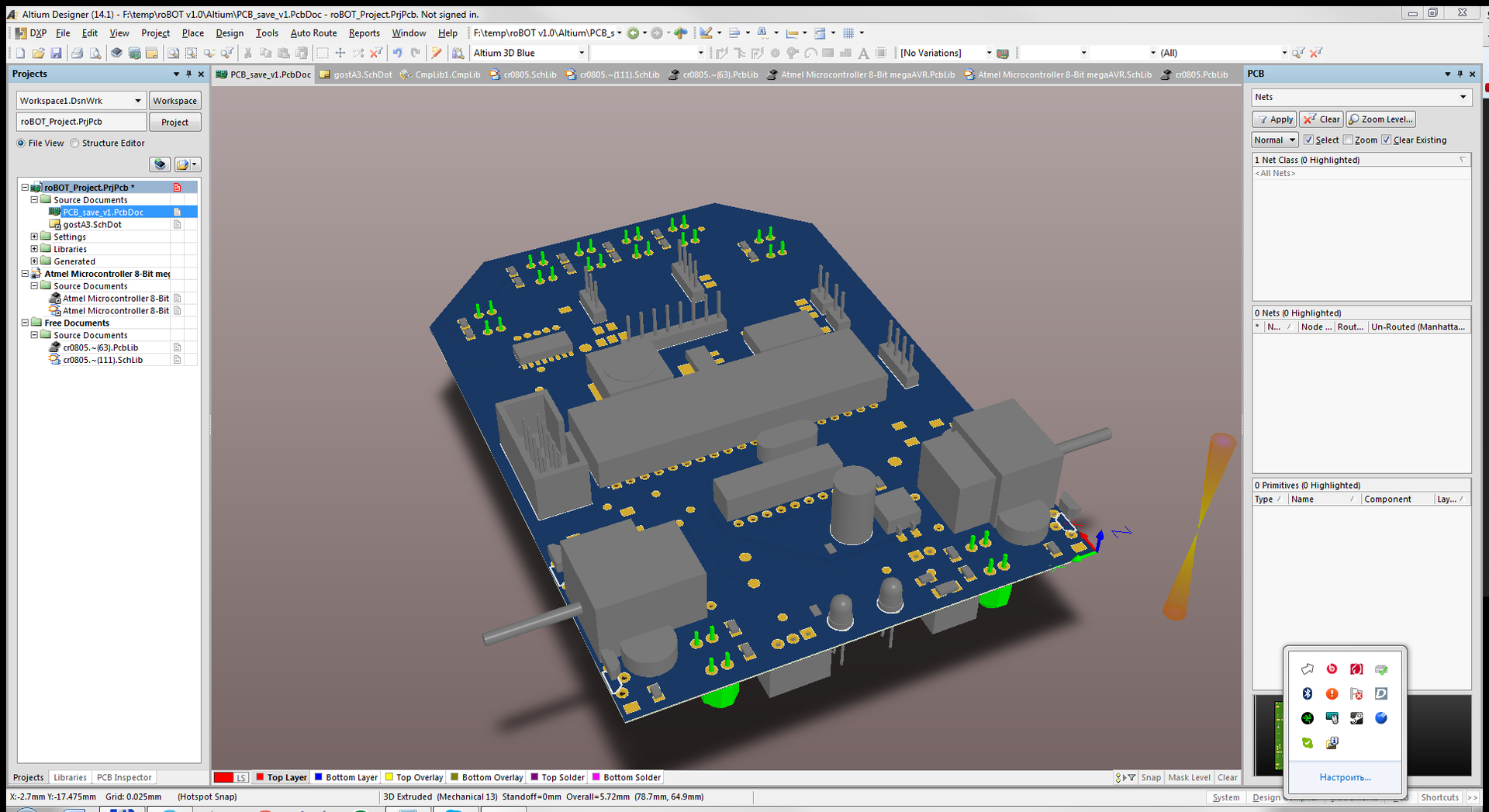
ボードの配線とドピルカを完了するのに約2週間かかりました。 その結果、本格的なPCBは容認できるように見えました。
これで、私の話の最初の部分を終了します。 あなたが興味を持っていたことを願っています。
私のhabropostのデザインとプレゼンテーションに対する建設的な批判を期待しています。 いずれにせよ、プリント基板自体の作成プロセスを説明する1つまたは2つのパートを行い、ロボット全体の組み立て方法を少し説明し、完成したデバイスの写真を見せ、コンピューターのプログラムについて話し、ロボットの動作の短いビデオを入れます。