残念なことに、残念なことに、2005年にはケミカルブラザーズがいましたが、彼らは素晴らしいクリップを持っていました。Believeは、ロボットアームが街中のビデオヒーローを追いかけた場所です。
それから私は夢を見ました。 当時は実現できませんでした。電子機器についてはまったくわからなかったからです。 しかし、私は信じたかった-信じています。 10年が経ち、ちょうど昨日、自分のロボットマニピュレーターを初めて組み立て、それを仕事に入れ、それを壊し、修理し、仕事に戻し、その過程で友人を見つけて自分の能力に自信を得ることができました。
ネコネタバレ注意!それはすべて
このセットで始まりました(こんにちは、マスターキット、ブログへの書き込みを許可してくれてありがとう!)。これは、Habréの
この記事の直後に見つかり、選択されました。 サイトでは、ロボットを組み立てることは、8歳の子供でもできると言っていますが、私よりも悪いのでしょうか? 私は同じように手を試します。
最初は妄想がありました
真の妄想として、私は最初にデザイナーに関して抱いていた恐怖をすぐに表現します。 私の子供時代には、最初はソビエトの堅実なデザイナーがいて、次に中国のおもちゃが私の手の中に散らばっていました...そして私の子供時代は終わった:(
したがって、おもちゃの記憶に残ったものは次のとおりでした:
- プラスチックは手で壊れて砕けますか?
- 部品はしっかりとはまりますか?
- キットにはすべての詳細が含まれていませんか?
- 組み立てられたデザインは壊れやすく、短命ですか?
そして最後に、ソビエトのデザイナーから学んだ教訓:
- 部品の一部は提出する必要があります
- そして、パーツのパーツは単にセットに含まれません
- また、最初は別の部分が機能しないため、変更する必要があります
今言えることは、お気に入りのミュージックビデオ「Believe」で、主人公が存在しないところに恐怖を感じることは無駄ではありません。
恐れのどれも正当化されませんでした :詳細は必要なだけ正確で、私の意見では、それらはすべて一緒に収まります-理想的には、仕事中の気分を大いに上げました。
デザイナーのパーツは互いに完全に適しているだけでなく、
詳細を混同するのがほとんど不可能な瞬間も考えられます。
確かに 、ドイツのペダントリーでは、クリエーター
は必要に応じて正確にコグを捨てるので、床でコグを失うか、ロボットを組み立てるときに「どちらの方法で」混乱させるのは望ましくありません。
仕様:長さ: 228 mm
高さ: 380 mm
幅: 160 mm
アセンブリの重量: 658 gr。
電源: 4個のタイプDバッテリー
持ち上げたアイテムの重量:最大100 gr
バックライト: 1 LED
制御タイプ:有線リモート
推定ビルド時間: 6時間
ムーブメント: 5個のコレクターモーター
運動保護:ラチェット
モビリティ:グリップ
機構: 0-1.77 ''
手首の動き: 120度以内
肘の動き: 300度以内
肩の動き: 180度以内
プラットフォーム上の回転: 270度以内
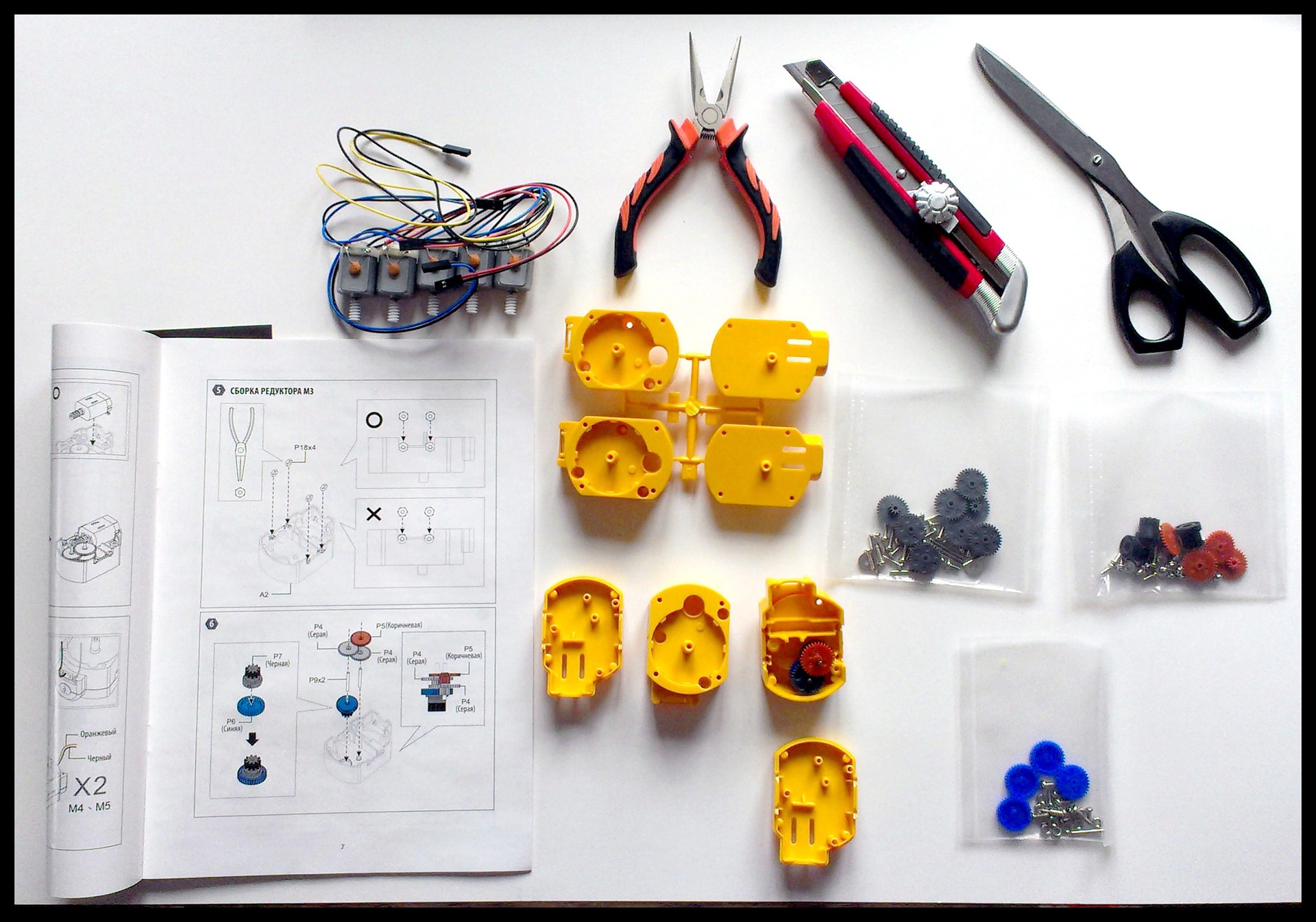
次のものが必要です。- 細長いペンチ(あなたはそれらなしではできません)
- サイドニッパー(ペーパーナイフ、ハサミに交換可能)
- プラスドライバー
- 4個のD型電池
重要! 細部について
「歯車」といえば。 同様の問題が発生し、アセンブリをさらに便利にする方法を知っている場合は、コメントを歓迎します。 これまでのところ、私は私の経験を共有します。
機能は同じであるが長さが異なるボルトとネジは、説明書に非常に明確に記載されています。たとえば、下の中央の写真には、ボルトP11とP13があります。 または多分P14-まあ、それは、再び、私はそれらを再び混乱させます。 =)
あなたはそれらを区別することができます:指示はどれが何ミリメートルであるかを明記しています。 しかし、第一に、あなたはキャリパーと一緒に座ることはありません(特に8歳であり、そして/または単に持っていない場合)、そして第二に、最後に、すぐに来ないかもしれません私の心に(私はそれを得なかった、hehe)。
したがって、このロボットまたは同様のロボットを自分で組み立てることを決めた場合は、事前に警告します。ここにヒントがあります:
- または、ファスナーをよく見てください。
- または、高騰しないように、より小さなネジ、ネジ、ボルトを購入してください。
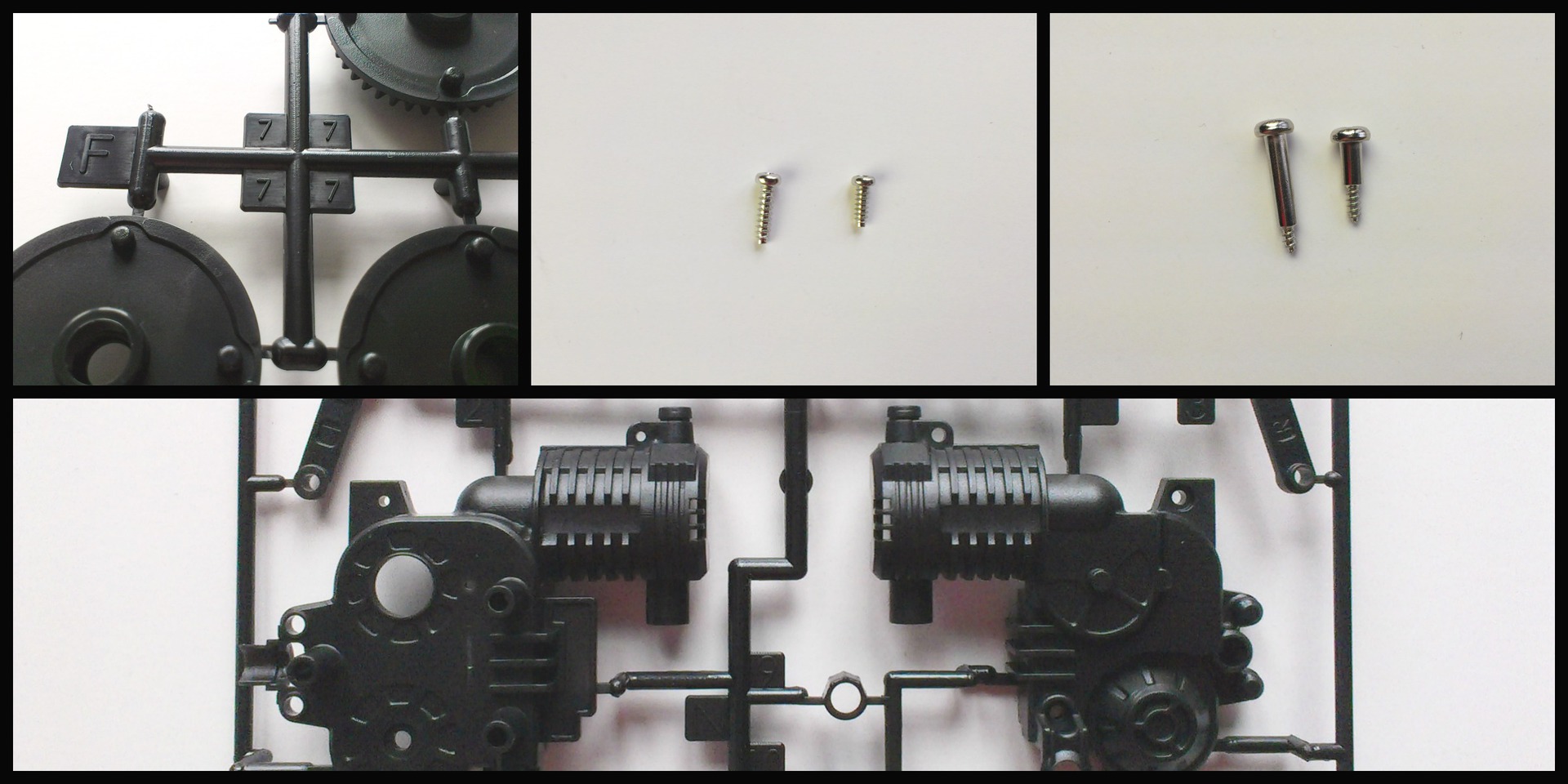
また、組み立てが完了するまで何も捨てないでください。 ロボットの「頭」の本体の2つの部分の間にある中央の下部の写真には、小さなリングがあり、他の「スクラップ」とともにごみの中にほとんど飛び込んできました。 ちなみに、これはグリップ機構の「ヘッド」にあるLED懐中電灯のホルダーです。
組立工程
取扱説明書は、不必要な言葉なしでロボットに添付されています-画像のみ、明確にカタログ化されマークされた詳細。
部品は非常に便利で剥ぎ取られており、剥離する必要はありませんが、各部品を段ボールのナイフとハサミで処理するというアイデアが好きでしたが、これは必須ではありません。
アセンブリは、設計に含まれる5つのモーターのうち4つから始まります。これは、組み立てるのが本当に楽しいことです。ギアメカニズムが大好きです。
モーターがきちんと梱包され、互いに「スタック」していることがわかりました-コレクターモーターが磁化される理由を子供の質問に答える準備をします(コメントですぐにできます!:)
重要: 5つのモーターケースのうち3
つでは、側面のナットを
引っ込める必要があります。将来的には、アームを組み立てるときにボディに
ナットを取り付けます。 サイドナットは、プラットフォームのベースに移動するモーターだけに必要なわけではありませんが、後でどちらのケースに行くのかを思い出さないために、4つの黄色い体のそれぞれのナットを一度にdrれる方が良いでしょう。 この操作の場合のみ、ペンチが必要になりますが、将来は必要ありません。

約30〜40分後、4つのモーターのそれぞれに独自のギア機構とハウジングが装備されました。 すべては、「キンダーサプライズ」が子供の頃に行っていたよりも複雑ではなく、はるかに興味深いものになります。
上の写真の注意力の問題: 4つの出力ギアのうち3つは黒で、白はどこですか? 青と黒のワイヤーが彼女の体から出てくるはずです。 手順では、これですべてです。ただし、もう一度注意する価値があると思います。
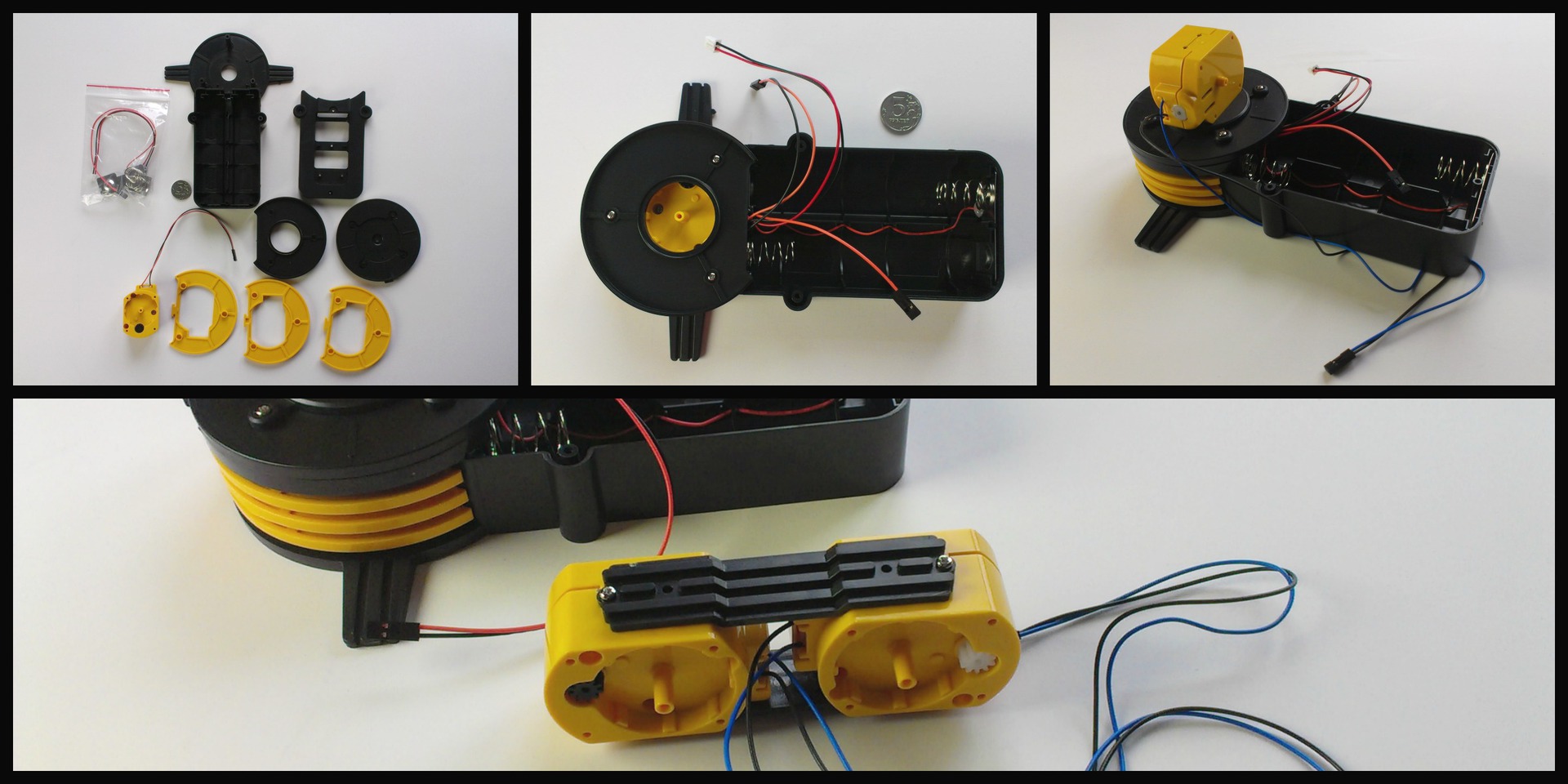
「ヘッド」モーターを除くすべてのモーターを手に入れたら、ロボットを載せるプラットフォームの組み立てを開始します。 この段階で、私はネジとネジをより慎重に扱う必要があることに気付きました:上の写真でわかるように、サイドナットのためにモーターを一緒に固定するのに十分な2本のネジがありませんでした-それらはすでにどこかにネジ止めされていますすでに組み立てられたプラットフォームの深さ。 即興演奏しなければなりませんでした。
プラットフォームとアームの主要部分が組み立てられると、指示により、把持機構の収集に進むように促されます。把持機構には、小さな部品と可動部品がいっぱいです-最も興味深い!

しかし、これはネタバレを終わらせ、ビデオが始まると言う必要があります。ガールフレンドとの会議に行かなければならず、ロボットを連れて行かなければならなかったので、どうにか終了できませんでした。
ロボットで会社の魂になる方法
簡単! 私たちが一緒に組み立てを続けたとき、それは明らかになりました:私たち自身でロボットを組み立てることは
非常に楽しいです。 一緒に建設に取り組むことは二重に楽しいです。 したがって、退屈な会話のためにカフェに座りたくないが、友人と会って楽しい時間を過ごしたい人には、このキットを安全にお勧めできます。 さらに、このようなセットを使用したチームビルディング(たとえば、速度を上げるための2つのチームによるアセンブリ)は、ほとんどwin-winオプションのようです。
ロボットは、組み立てが完了するとすぐに手に入りました。 あなたに私たちの熱意を伝えるために、残念ながら、私は言葉ではできませんが、私はここの多くが私を理解すると思います。 あなた自身が組み立てたデザインが突然完全な生活を始めたとき-それは話題です!
私たちはひどく空腹であることに気付き、食べに行きました。 遠くないので、ロボットを手に持って行きました。 そして、ここで私たちは別の楽しい驚きに直面しました:ロボット工学は魅力的であるだけではありません。 彼女も一緒になります。 テーブルに着くとすぐに、私たちはロボットに精通して同じものを集めようとする人々に囲まれました。 何よりも、「触手」ロボットに挨拶するのが好きでした。なぜなら、それは本当に生きている人間のように振る舞い、何よりもまず同じ手だからです! つまり、
アニマトロニクスの
基本原則は、ユーザーが直感的に習得したものです 。 外観は次のとおりです。
トラブルシューティング
帰宅後、不愉快な驚きが私を待っていました。トラブルシューティングについてすぐに議論するので、このレビューの公開前に起こったことは良いことです。
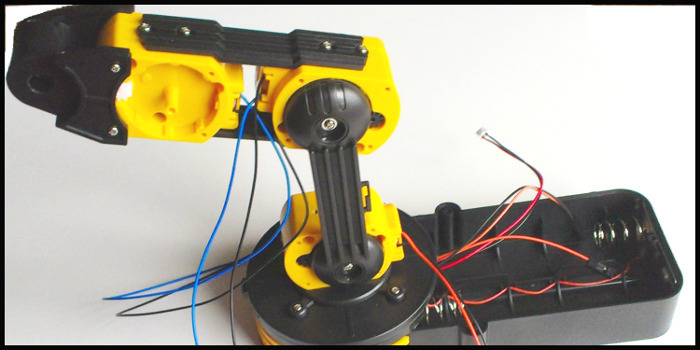
手を最大振幅で動かそうとすることを決めたので、肘のモーター機構の機能の特徴的な亀裂と故障を達成することができました。 最初は私を怒らせました。まあ、新しいおもちゃで、組み立てられているだけで、もう機能しません。
しかし、それは私に夜明けを告げました:あなた自身がそれを集めただけなら、問題は何でしたか? =)ケース内のギアのセットを完全に把握しています。モーター自体が故障しているかどうかを理解するため、またはケースが十分に固定されていない場合は、ボードからモーターを取り外すことなく負荷をかけて、クリックが続くかどうかを確認できます。
それが
本当のロボマスターのように感じることができたのはその時でした!

「肘関節」を慎重に分解すると、負荷なしでモーターがスムーズに動作することを確認できました。 ケースは別れ、ネジの1つが内部に落ちました(モーターによって磁化されたため)。操作を続けた場合、ギアが破損していました。分解したときに摩耗したプラスチック製の特徴的な「パウダー」が見つかりました。
ロボットを完全に分解する必要がないのは非常に便利です。 そして、この場所での組み立てがきちんとされておらず、工場の問題が原因ではないので、故障が起こったのは本当にクールです。私のキットにはまったく見当たりませんでした。
ヒント:組み立て後初めて、ドライバーとプライヤーを手元に置いておきます-便利になる場合があります。
このキットのおかげで何を育てることができますか?
自信を持って!
完全に見知らぬ人と通信するための共通のトピックを見つけただけでなく、自分で組み立てるだけでなく、自分でおもちゃを修理することもできました! だから、私は疑う余地はありません:私のロボットではすべてが常に大丈夫です。 そして、これはあなたの好きなものになるととても気持ちがいいです。
私たちは、売り手、仕入先、サービス従業員、自由な時間とお金の確保に大きく依存している世界に住んでいます。 あなたがほとんど何もしない方法を知っているなら、あなたはすべてのためにお金を払わなければならないでしょう。 各ユニットがどのように配置されているかを知っているため、自分でおもちゃを修理する能力は貴重です。 子供にそのような自信を持たせましょう。
まとめ
何が好きでしたか:- 指示に従って組み立てられたロボットはデバッグを必要とせず、すぐに起動しました
- 詳細を混同することはほとんど不可能です
- 厳密なカタログ化と部品の入手可能性
- 読む必要のない指示(画像のみ)
- 設計に大きなバックラッシュとギャップがない
- 組み立てやすさ
- 予防と修理の容易さ
- 最後になりましたが、あなたは自分でおもちゃを集めます。フィリピンの子供たちはあなたのために働きません
他に必要なもの:- より多くのファスナー、ストック
- 必要に応じて交換できるように、パーツとスペアパーツ
- より多くのロボット、異なる複雑な
- 改善/添付/削除できるアイデア-つまり、ゲームはアセンブリで終了しません! 彼女に続けてほしい!
評決:このコンストラクターからロボットを組み立てるのはパズルやキンダーのサプライズほど難しいことではありません。結果だけがはるかに大きくなり、私たちや他の人の間で感情の嵐を引き起こしました。 素晴らしいセット、ありがとう、
ダジェット !
結論として、Habr、あなたにいくつか質問があります:- 独自のマニピュレーターをどのように使用しますか?
- 停止したりプレイを続けたりしないように、何かを変更したり、ロボット自体のデザインに追加したりすることは可能だと思いますか?
- 組み立てプロセス中に考慮されなかったことは何ですか?
- とにかく、レビューはどうですか? =)