
フリースケールのマイクロコントローラのKinetisファミリ
に関する以前の記事で簡単に知り合った後、これらのチップに基づいたマイクロコントローラモジュールプロジェクトを紹介したいと思います。
このモジュールは、
機能が豊富で、多数の入出力ラインとさまざまなシリアル通信インターフェイスを備えた、
多機能で
信頼性の高い中央制御ユニットの必要性に応じて作成されました。
このモジュールは、その小さな寸法、独自のアーキテクチャ、便利な取り外し可能なボード間接続により区別されます。これは、多数の接点(200を超える)でもモジュールを取り外すための比較的小さな力を提供し、ハードリアルタイム制御システムでの使用に特化しています。
このモジュールは、
産業用デバイスおよび機械、
ホームオートメーション 、
ロボット工学 、マイクロコントローラーのプログラミングを研究するための教育目的、
監視システムおよび他の多くの分野で使用できます。 組み込みの
Wi-Fi イーサネットインターフェイスにより、モジュールを広域ネットワークや
モノの
インターネット(IoT)に簡単に統合できます。 ビルトイン
TFTディスプレイインターフェイスとフィールドバスインターフェイスコントローラーは、モジュールに基づいてコントロールパネルと論理プログラマブルコントローラーを作成するのに役立ちます。 また、
USB 2.0 HSインターフェイスと、予備のプログラマブルアンプを備えた8つの独立した
16ビットADCチャンネルが組み込まれているため、このモジュールはPCで外部信号を記録および処理するための優れたツールになります。
このモジュールには
、FreescaleのARM Cortex-M4コアに基づくKinetisファミリーの2つのマイクロコントローラーが含まれています。
なぜ2つのマイクロコントローラーで、なぜKinetisなのですか?
少し分析します:今日の組み込みマイクロコントローラモジュールの市場では、次の傾向を区別できます。
- クリスタル上の強力なシステムクラスチップ上のモジュール。 これらには、BeagleBone、Raspberry Piなどのボードが含まれます。
その欠点は、まず、シリアルインターフェイス、多相PWM変調器、DACなどの機能を備えた非常に少数の利用可能な外部I / Oラインにあります。 第二に、そのようなボードはソフトウェア保護メカニズムを提供しません。 これらは、公開されたオープンプロジェクト専用に設計されています。 第三に、Cortex-M4チップに匹敵する低電力モードを提供できません。 結論として、彼らはハードリアルタイムでシステムで動作するように設計されていません。 メーカーは、主にLinux、Windowsなどの汎用オペレーティングシステムのプラットフォームとして位置付けています。 オペレーティングシステムなしでこれらのボードを使用しようとすると、多くの場合、完全なドキュメントにアクセスできなくなります。
- 最も単純な8ビットマイクロコントローラー上のモジュール。非常に低価格が特徴です。 これらは、Arduinoとそのバリエーション、およびクローンです。 ここでの問題は、機能とパフォーマンスです。 原則として、マイクロコントローラーを備えた追加のボードによって解決されます。 しかし、この機能にはまだ多くの要望が残されています。 デバッグツールも不十分です。 低機能と開発環境。
- FPGA上のモジュール。 プロセッサコアは、FPGAに既に統合されているか、FPGAで合成されています。 いずれにせよ、ソフトウェアおよびアナログ機能のインサーキットデバッグの機能は、マイクロコントローラーの機能よりも弱く、エネルギー管理の柔軟性は低く、周辺コントローラーは自分で合成する必要があります。 UART、CAN、スキャッター/ギャザーDMA、USB、イーサネット用のCortex-M4チップなどの高品質の周辺機器コントローラーは非常に高価であり、別途購入する必要があります。
- STM32F、LPC、EFM32などのファミリーのシングル32ビットマイクロコントローラーを搭載したモジュール 一般に、これらのボードは、適切なものを見つけることが困難なソリューションの集合体を形成します。 しかし、ソフトウェアの複雑さを増す現代の傾向により、単一チップ上での動作の信頼性を確保することが困難になります。 従来、信頼性は2つ以上のマイクロコントローラーを使用することで、できればチップまたはボード規模のマイクロコントローラーのネットワークで提供されていました。 ミドルウェアとアプリケーションソフトウェアはコーヒーメーカーにとっても複雑になりすぎており、シングルチップ上でスムーズに実行することはますます難しくなっています。
結論:
2つのマイクロコントローラーは、各部品を別々のチップに配置することにより、アプリケーションの重要な部分と重要でない部分を分離できます。 ここに、マルチプロセッサシステムの動作をサポートする自由に利用可能な
MQXオペレーティングシステムの可用性を追加します。 また、
ARM Cortex-M4コアには、複雑なソフトウェアの開発に不可欠となる非常に効果的なインサーキットデバッグツールが組み込まれています。 また、MQXオペレーティングシステムでは、Freescaleマイクロコントローラーのライセンスを購入する必要がないため、選択はKinetisファミリーに委ねられました。
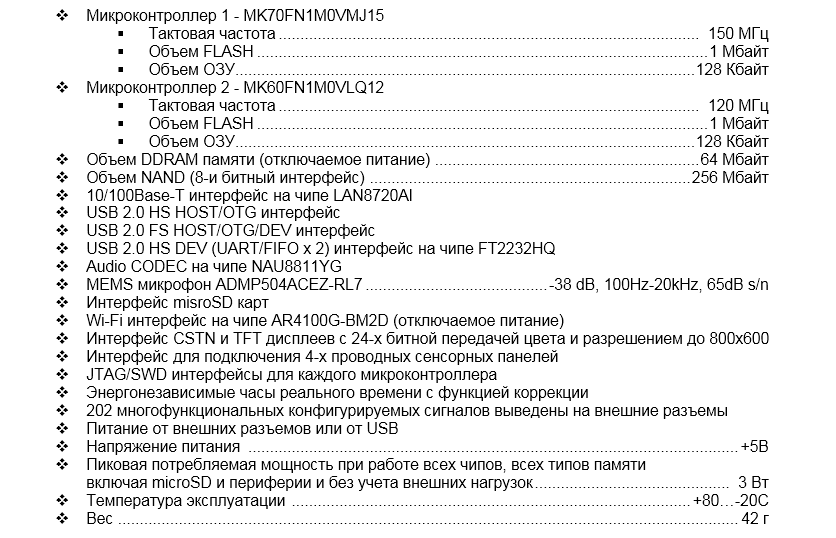
モジュールの技術的特徴:
ブロック図:
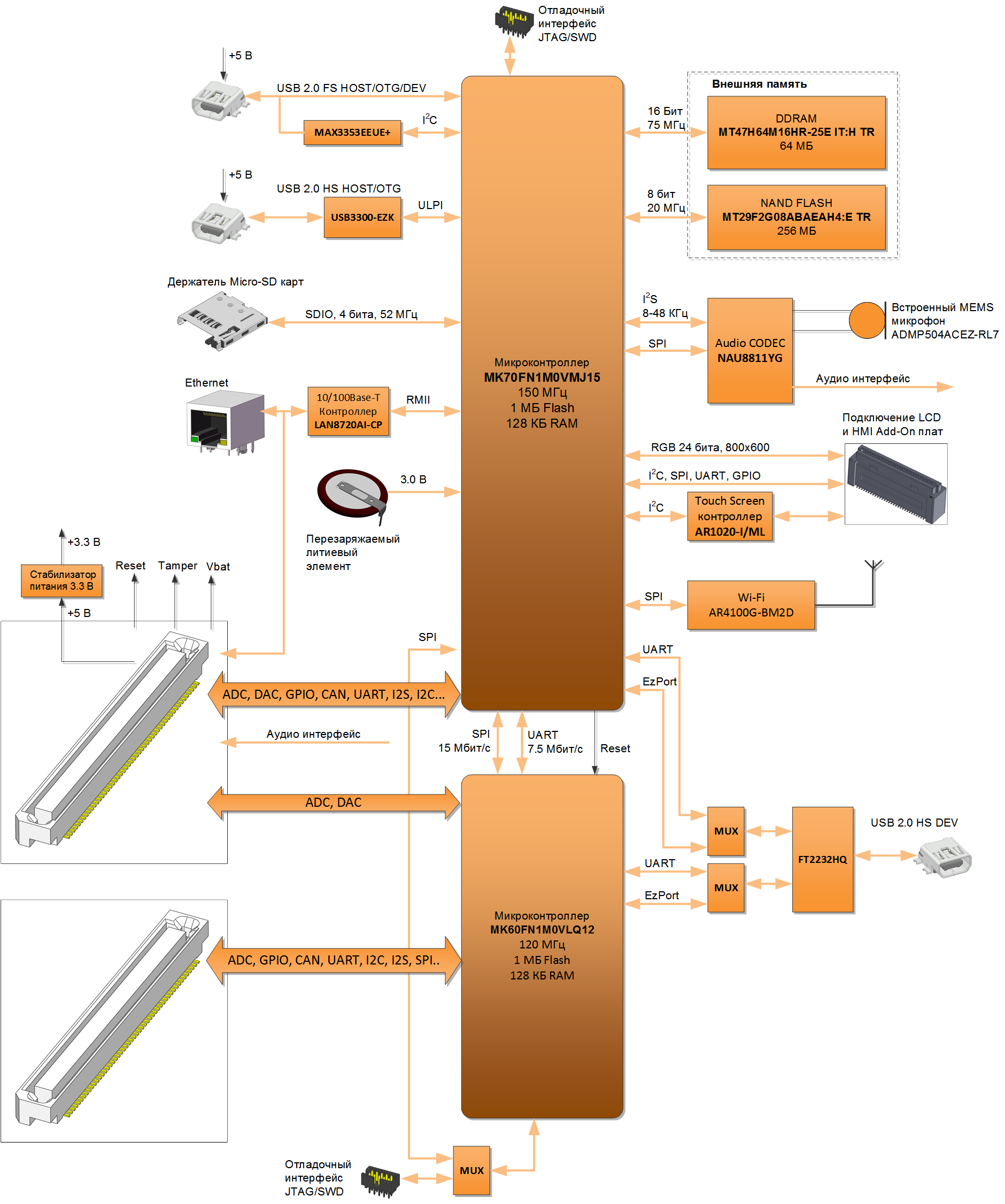
この回路の機能は、常駐ローダーを使用せずに、1つのUSB HSインターフェイスを介してボード上の両方のチップを迅速に同時に再プログラムする機能です。 つまり チップ内のローダー領域のフラッシュメモリに障害が発生しても、モジュールのパフォーマンスを復元するために特別な機器を使用する必要はありません。
また、ボード上の1つのマイクロコントローラー(MK70)は、2番目の常駐ローダーを使用せずに別のマイクロコントローラー(MK60)を再プログラムできます。 両方のチップには、ソフトウェアを読み取りから保護する機能があります。
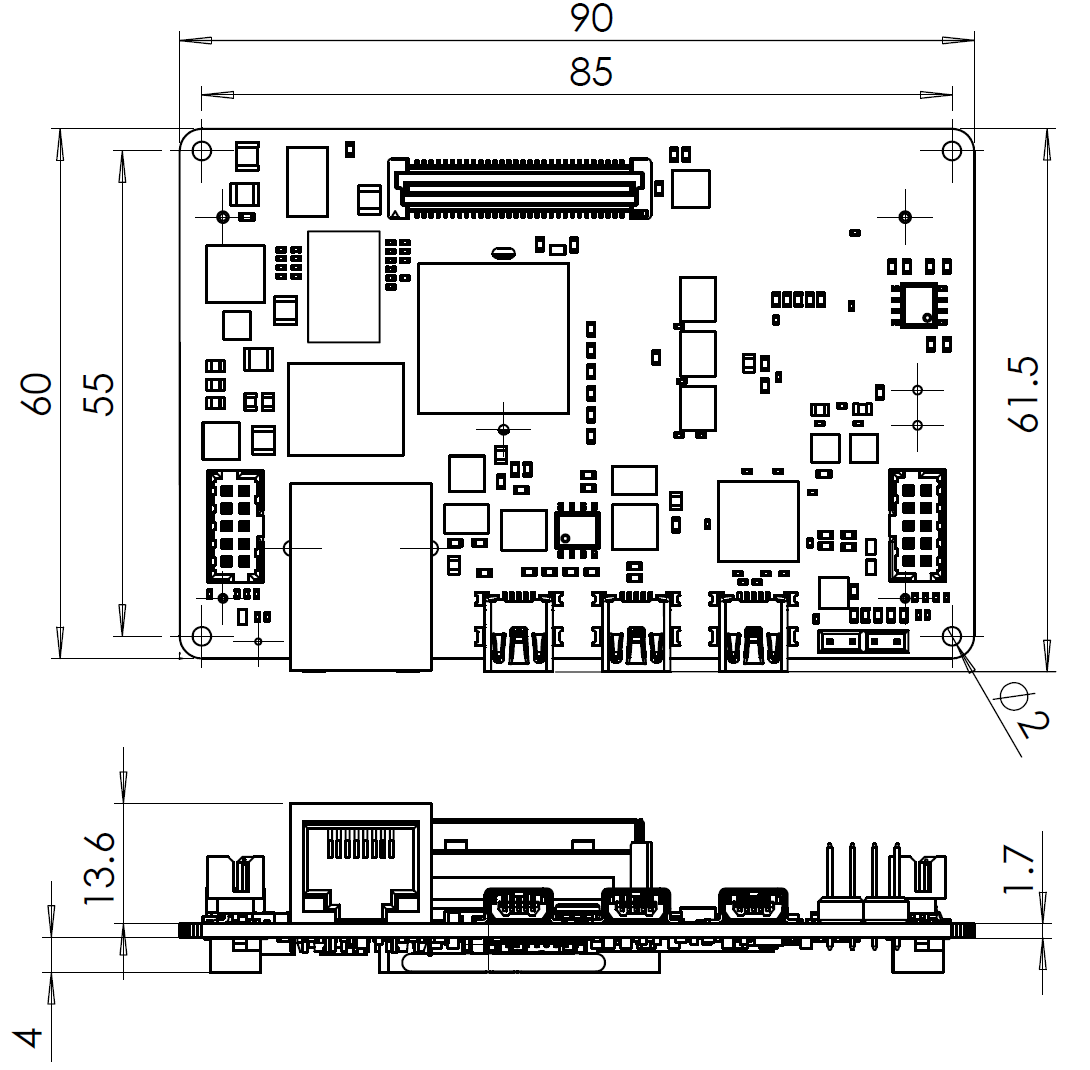
モジュールの寸法:
ピン配列:
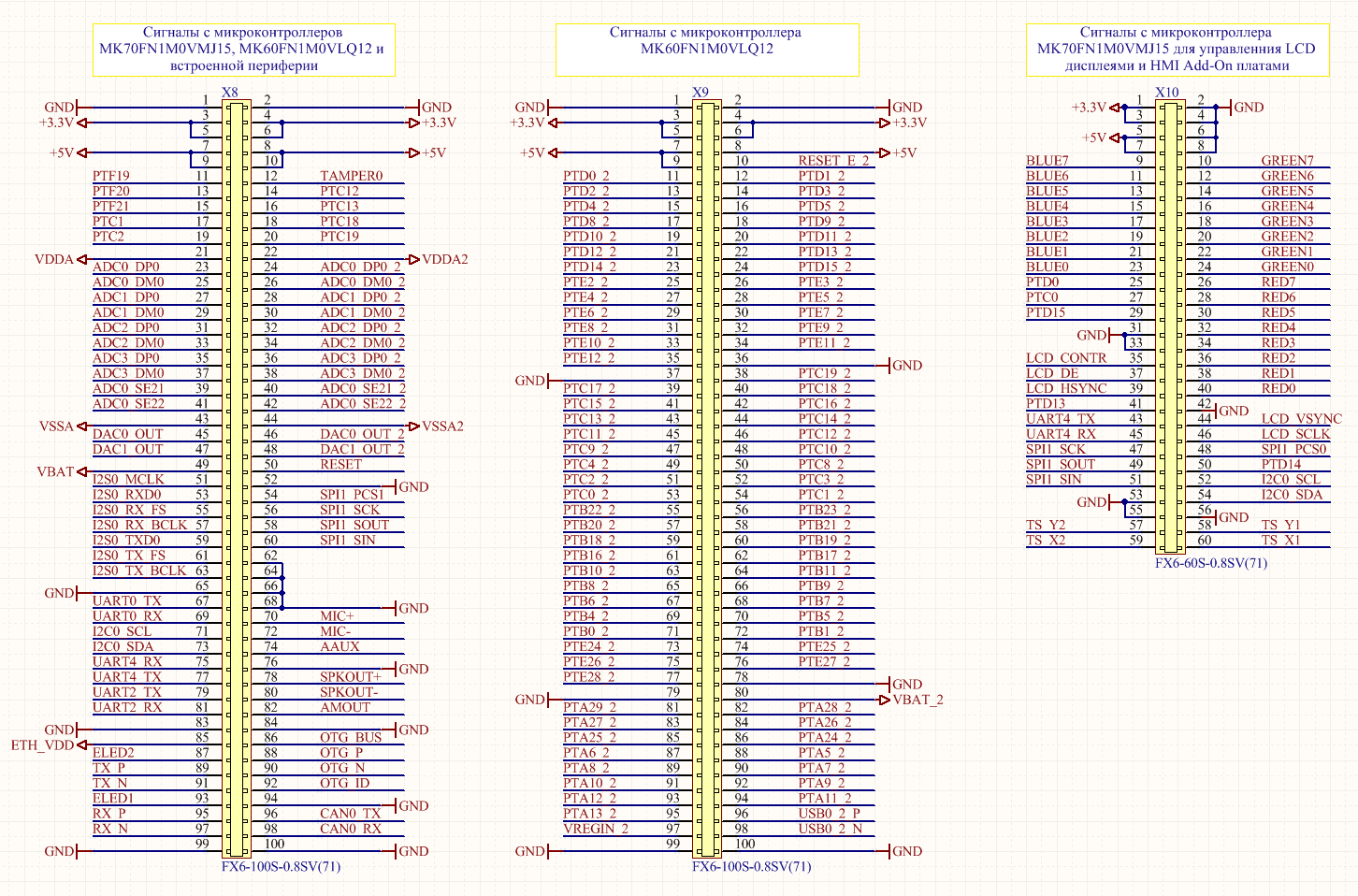
サフィックス_2の付いた信号は、マイクロコントローラー2(MK60FN1M0VLQ12)に属します
同様のモジュールとは異なり、外部コネクタへの信号出力はボード上の周辺機器と多重化されておらず、制限なく使用できます。
回路基板:
モジュールボードには8つのメタライゼーション層があり、そのうちの2つは大地に浸水し、1つは3.3 Vの電力に浸水します。Wi-Fiアンテナの下には何も充填されていません。 ピークゲインが5.46 dBiのANT8010LL04R2400A全方向性アンテナが使用されます。
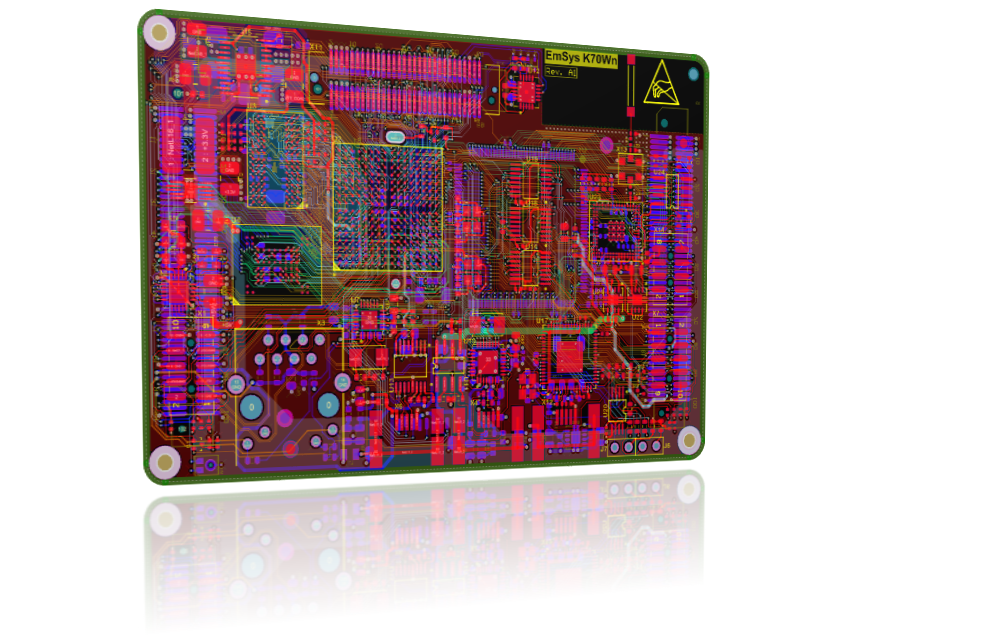
ボード層スタック構造

現時点では、320 x 240ピクセルの3.5インチTFTディスプレイとタッチスクリーンを備えた追加のボードがモジュール用に開発されています。
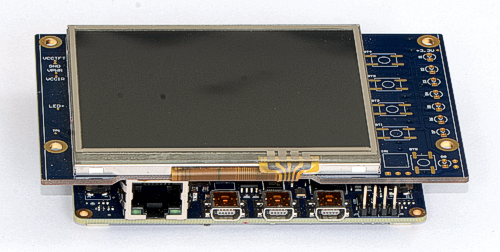
追加料金のドラフトは後で公開されます。
モジュールボードと回路の生産の完全なソースファイルはこちらです:
https :
//github.com/Indemsys/EmSys-K70Wn-PCB