 翻訳者から
翻訳者から :この投稿は、セガジェネシス/メガドライブおよび
ソニックCD用の
ソニック・ザ・ヘッジホッグシリーズのゲームのソニック物理ガイドの一部の翻訳です。 次のセクションでは、ランニング、ジャンプ、スピン、リングの喪失、水中行動、超高速、アクセシビリティ、カメラ、アニメーションなどのトピックについて説明します。 多くの部分(
14個 )があるため、投稿の最後に調査を追加しました。 続行する必要があります-あなたが決定します。
シリーズの他の部分へのリンク:パート2:実行中パート3および4:ジャンプとスピンパート5と6:リングの喪失と水中への侵入パート7および8:スプリングとギズモ、スーパースピードご注意この記事では、ソニックの衝突と固体タイルとの相互作用について説明しています。 モニター、移動プラットフォーム、ブロックなどのソリッドオブジェクトには、Sonicとの独自の衝突処理手順がありますが、これは必ずしもソリッドタイルの動作と一致しません。
はじめにソリッドタイルとは何ですか? Sonicゲームを構成するゾーン(レベル)には多くのソリッドオブジェクトがあります。そのため、環境がすべて64バイトのRAMを占有するソリッドオブジェクトで完全に構成されている場合、ゾーンは大量のメモリを必要とします。 スマートな動きが行われました-ゾーンはタイルから作成されるため、必要なのはタイルが固体(不透過性)かどうかを知ることだけです。
ゾーンは128x128ピクセル(または
Sonic 1および
Sonic CDでは 256x256ピクセル)のブロックに分割され、さらに16x16ピクセルのタイルに分割されていることがわかります。 また、サイズが8x8ピクセルの小さなタイルに分割されます。 ソリッド要素を処理するすべての魔法は、タイル16x16のレベルで発生するため、このレビューではそれらにのみ関心があります。
ソニックのこれらのソリッドタイルとの相互作用と衝突は、コアゲームエンジンを形成します。 彼らは、床、壁、天井、ランプ、ヒンジの操作方法を決定します。 これは膨大で複雑なトピックなので、私のレビューは他のSonicゲームの物理ガイドとは異なりますが、推論を最小限に抑えようとします。
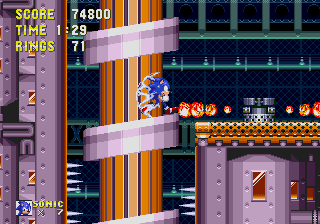
立ち
736($ 02E0)に等しいY軸に沿った地球の位置をとると、ソニックは座標716($ 02CC)でその上に立ちます。 地上20ピクセルです。
押すソニックは壁にぶつかると停止するはずです。 これは、ラインとの衝突を確認することで実現できます。 コライダーライン(トランスレーター
から:ここと以降、センサーという用語が使用されていますが、私が選んだ、適切なアナログと思われます )はY軸上のその位置にあるべきではありませんが、わずかに低くなければ、短いステップに気付かないでしょう。 また、彼女は低すぎることはできません。そうでなければ、彼女はソニックが押し出すべきでない斜面と曲線に「気づく」でしょう。 Sonicの位置からY + 4座標での位置は、通常、高さが16ピクセル未満の階段がないためです(そのような階段がある場合、タイルではなく固体オブジェクトで構成されます)。
コライダーラインの幅はどれくらいですか?

壁の左側の704($ 02C0)に等しいX座標を取得する場合、Sonicは693($ 02B5)よりも近くないはずです。 壁の右側の831($ 033F)に等しいX座標を取得する場合、Sonicは842($ 034A)より近くないはずです。 これは、両方向で11ピクセルの差になります。
したがって、コライダーラインの幅は20ピクセルで、X-10からX + 10 Sonicに引き伸ばされる必要があります。 ソリッドタイルが検出されるたびに、タイルの座標をマイナス(またはプラス)11に設定してソニックを「押し出す」必要がありますが、地上での移動速度はゼロにする必要があります。 (10ピクセルのみを押し出すことはできません。そうでない場合、座標X + 10のポイントはまだタイルの境界ピクセル内にあります。この場合、一定の衝突が登録され、壁に貼り付きます。)
タイルの境界線からSonicの位置を引いた値は11でなければならないため、Sonicの中心とタイルの境界線の間には10ピクセルしかありません。 ソニックからの11番目のピクセルは、タイルの端になります。 したがって、Sonicの実際の幅は20ピクセルです。
秋ソニックはサイトから脱出できるはずです。 彼は漫画Wile E. Coyoteコヨーテのように振る舞うことができず、彼の下には何もないことに気づかない。

これは、Sonicが下の固体タイルもチェックする必要があることを意味します。 これは、下向きのコライダーをさらに2行追加することで実現できます。 ソニックの左側、X-9座標に1つ(A)があります。 もう1つ(B)は右側のX + 9です。 Y軸に沿った位置から開始し、Y + 20に位置する地面レベルで足より16ピクセル以上下がらなければなりません(ただし、低くなりすぎないか、低い階段や階段から降りると落ちるでしょう)。したくない)。
コライダーAとBがソリッドタイルを検出しない場合、ソニックは「落下」します。空中にあることをエンジンに通知するフラグが設定されます。
壁との衝突では、Sonicの幅が20ピクセルであることを覚えています。 ただし、地上検出コライダーは中心からわずか18ピクセルです。 ソニックは、壁にぶつかるときよりもサイトから逃げるときの方が「2ピクセル薄い」ことがわかりました。
エッジでのバランス調整良い詳細-ソニックは、サイトの端に近いバランスアニメーションに進みます。 これは、彼が停止したときにのみ発生します(地面の速度は0です)。
エンジンはこれについてどのように知っていますか? すべてがシンプルです-コライダーの1つだけがアクティブになった瞬間に、ソニックは最前線にいます。 AがアクティブでBがアクティブでない場合、サイトはその右側にあります。 それ以外の場合、サイトは左側にあります。
しかし、ソニックがバランスを取り始めた場合、コライダーの1人が何も見つけないとすぐに、彼は「早く」バランスを取り始め、それは愚かに見えます。 したがって、これは1つのコライダーのみがアクティブで
あり 、X軸上の位置がアクティブなコライダーによって検出されたソリッドタイルの境界よりも大きい場合に発生します。

サイトの右端の座標を2655($ 0A5F)にすると、ソニックは2656($ 0A60)でのみバランスを取り始めます。 両方のコライダーが何も見つけられないとき、それは2665($ 0A69)に落ちます。
Sonic 2および
Sonic CDでは 、サイトがソニックのビューと反対方向にある場合、2番目のバランスアニメーションがオンになります。
Sonic 2 、
Sonic 3、および
Sonic&Knucklesでは 、パッドの端にさらに近づくと、3番目のバランスアニメーションがあります。 上記の値を設定すると、座標2662($ 0A66)にあるときにオンになります。
注:バランスをとる場合、一部の機能は使用できません(地面に押し付ける、見上げる、回転するなど)。
Sonic 3&Knucklesでは、プレイヤーは地面に寄り添って回転することができます(ただし、見上げることはできません)。
勾配と曲線ソニック・ザ・ヘッジホッグは、曲面と360度のループを使用した最初のゲームの1つでした。 その時代のほとんどのゲームでは、環境は完全にブロックから作成されていました(時には斜面から作成されていました)。
形状を滑らかに変化させるオブジェクトを操作する機能は、Sonicゲームの新規性と魅力の基本的な側面の1つです。 残念ながら、これはおそらくファンゲームで再現するのが最も難しい側面です。
どのように機能しますか?
高さのマスクコライダーAまたはBがソリッドタイルを検出するたびに、そのタイルの高さが返されます。
タイルの高さはどうですか?
各タイルには、メモリに保存されたマスクに関連付けられた値が関連付けられています。 マスクは、0($ 00)〜16($ 10)の範囲の16の高さ値と角度値の単純な配列です。
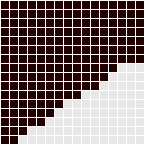
たとえば、この高さマスクには、高さ0 0 1 2 2 3 4 5 5 6 6 7 8 9 9 9の配列と232の角度($ 00 00 01 02 02 03 04 05 05 06 06 07 08 09 09 09と$ E8の角度)があります。
使用される高さ配列の値は何ですか? コライダーのX位置からタイルのX位置を引きます。 結果は、使用される高さ配列インデックスになります。
見つかった高さの値が16(10ドル)の場合、コライダーは最初に見つかったタイルの上の別のタイルをチェックし、その高さの値を決定する必要があります。
コライダーが最高の高さを検出すると、ソニックのY座標はこの高さから20ピクセルを引いたものに等しく設定されます。 その角度も、最高の高さを返すソリッドタイルの角度に等しく設定されます。
コライダーがソリッドタイルを見つけられない場合、デフォルトでは脚のレベル(Y + 20)が返されます。
このメソッドを使用したエラー残念ながら、元のエンジンでこのメソッドを使用しているため、いくつかの迷惑なバグがあります。
ソニックが傾斜したプラットフォームに立っている場合、コライダーの1人がタイルを検出せず、脚の高さを返します。 これは、ソニックが間違った位置にあるという事実につながります。

ソニックは、右に移動するとコライダーBとともに上昇します。 Bがサイトから「落ちる」と、SonicはデフォルトでコライダーAのレベルに移動します。その後、彼はコライダーAとともに上昇し、さらに右に移動します。 したがって、彼はサイトから脱出したときに最初に立ち上がり、落下し、再び立ち上がります。
これが目立つ領域はわずかですが、そのようなバグはGenesis / Mega Driveのゲームのすべての部分に存在し、かなり厄介に見えます。
2つ目のバグは、
グリーンヒル ゾーンレベルと
マーブルゾーンレベルの低い丘など、上下に反対の傾斜の2つのタイルがある場合に発生します。

コライダーBは、スロープから右に下降し始めますが、ソニックは、コライダーAによって検出された前のスロープのレベルをデフォルトのままにします。これらのスロープは非常に低いため、これによりソニックは中央で約1ピクセル低くなります。
しかし、それだけではありません。 ソニックは、最高のコライダーから角度データを受信するため、右に傾斜角があるはずのように見えても(それに近いため)、左に傾斜角があります。 ジャンプするとき、彼はこの角度でジャンプし、予想されたように前方ではなく後方に移動します。
斜めの動きこれはすべて非常に素晴らしく、素晴らしいです-ソニックはさまざまな高さの表面でスムーズに動きます。 ただし、エンジンは別の処理を行う必要があります。 現実的には、Sonicの速度をある角度で減速する必要があります。
角度がソニックの速度に影響する2つの方法があります。 1つ目は、同じ幅の平らな地面と同時に丘の上を走らないようにします。 2番目は、丘を上るときは速度を下げ、下るときは速度を上げます。 それぞれを順番に見てみましょう。
3つの速度変数Sonicがブロックのみを使用する通常のプラットフォーマーである場合、必要な速度変数は2つだけです。X軸(
Xsp )およびY軸(
Ysp )に沿った動き、Sonicの速度の水平および垂直成分です。 加速(
acc )、減速(
dec )、摩擦(
frc )が
Xspに追加され
ます 。 ジャンプ速度(
jmp )と重力(
grv )が
Yspに追加され
ます (ソニックが空中にある場合)。
ただし、ランプを使用している場合、ソニックはランプに沿って移動すると、水平方向と垂直方向に同時に移動します。 これは、
Xspと
Yspの両方にゼロ以外の値があることを意味します。
acc 、
dec、または
frcを
Xspに追加するだけでは
機能しなくなります。 ソニックが壁を駆け上がろうとしていることを想像してみてください-彼が上に移動しようとしているので、水平速度に追加しても役に立たないでしょう。
トリックは、3番目の可変速度(元のエンジンが行うこと)を使用することです。これを対地速度(
Gsp )と呼びましょう。 これは、角度に関係なく、地球に沿ったソニックの速度です。 値
acc 、
dec、および
frcは 、
Xspまたは
Yspではなく
Gspに追加されます。
地上では、
Xspと
Yspは、Sonicを移動する前の各ステップで
Gspから取得されます。 ここでは、擬似コードの例が適切だと思います。
Xsp = Gsp*cos(angle); Ysp = Gsp*-sin(angle); X += Xsp; Y += Ysp;
角度の変化に関係なく、速度
Gspが維持されるため、エンジンは常にソニックが「真に」動いている速度を認識します。
勾配係数ソニックは、正確な速度を維持しながら、あらゆる丘との相互作用を処理できるようになりました。 ただし、彼はまだ上昇中は減速し、下降中は加速する必要があります。
幸いなことに、これは勾配係数(
slp )の概念を使用して簡単に実現できます。 各ステップの始めに
slp * sin(
angle )を
Gspに追加するだけです。
実行中のslp値は常に0.125($ 0020)ですが、回転する場合は異なります。 Sonicが丘をスピンアップするとき(
Gspは sin(
angle )と等しくない)、
slpは0.078125($ 001E)です。 丘を下に回転するとき(
Gspの符号はsin(
angle )の符号に等しい)、
slpは0.3125($ 0050)です。
注:
Sonic 1では、 Sonicが停止し、スタンディング/待機サイクルにある場合
、 slp値
は追加されないようです。 ただし、
Sonic 3およびKnucklesでは、この場合でも
slp値
が追加されるため、Sonicは急な斜面に立つことができません。
角度ジャンプソニックがジャンプ時に立つ角度もジャンプに影響します。 彼は単に
Yspを
jmpに設定することはできません。彼は立っている角度から飛び出す必要があります。 したがって、正しい値を取得するには、cos()とsin()を使用して
jmp値を
Xspと
Yspの両方に割り当てる必要があります。
さらにいくつかの擬似コード:
Xsp -= jmp*sin(angle); Ysp -= jmp*cos(angle);
モードの切り替えそのため、ソニックは丘、斜面、敷地に沿って走ることができますが、これは悪くありません。 しかし、これでは十分ではありません。 彼は、追加のコードなしに地球から壁や天井に向かって進むことはできません。
なんで? ランドコライダーAとBは、それらの真下にある障害物をテストし、地球の高さを見つけます。 スキーム全体がY軸に沿って正確に上下に移動するように設計されているため、壁への移行を処理することはできません。
この問題を解決するには? 4つの異なる運転モードを使用します。 これには少し説明が必要です。
4つのモードソニックが360度移動できる場合、エンジンは360度すべてをほぼ同じ方法で処理すると想定するのが論理的です。 実際、エンジンは角度を4つの象限に分割し、作業を大幅に簡素化します。
私が話していることをよりよく理解するために、完全なループを持たず、低い丘と斜面のみを備えた、よりシンプルなプラットフォーマーを想像してみましょう。 キャラクターが水平方向に移動した後に行う必要があるのは、フロアレベルに到達するまで上下に移動することだけです。 次に、床の角度を測定する必要があります。 角度は
Gspを下げるために使用され、それ以上の目的には使用されません。 キャラクターは常に水平に移動し、フロアレベルに到達するまで厳密に上下に移動します。
ソニックに関するゲームでもほとんど同じことが起こります。 角度があまりにも急になった場合にのみ、ソニックは「象限」を変更し、フロアモードから右壁モードに切り替えます(天井モード、左壁、床モードに戻るなど)。 いつでも個々のモードで、ソニックは通常のプラットフォーマーのように動作します。 マジックは、これらの4つのモードと、それらの間のスマートなスムーズな切り替えを組み合わせたものです。
しかし、ソニックはどのようにしていつモードを切り替えるのでしょうか?
フロアモードで224($ E0)より大きい角度が検出されると、エンジンは右壁モードに切り替わります。 基本的に、すべては同じままで、コライダーのみが下部ではなく右側をチェックし、ソニックは垂直ではなく水平に「フロア」レベルに移動します。
右壁モードで224($ E0)未満の角度が検出されると、エンジンはフロアモードに戻ります。
他のトランジションも同様に機能します。
公正な疑問が生じるかもしれません-私たちが正しい壁モードにいるとき、地球衝突器はどこにありますか? それらはそこにありますが、90度回転します。 コライダーAは、ソニックの中心に対してX-9ではなくY + 9に位置しています。 コライダーBはX + 9ではなくY-9です。 コライダーラインは垂直ではなく水平になり、脚のレベルを超えて16ピクセル(X座標+ 20でソニックの「下」に20ピクセル)伸びます。
はい、コライダーが動くため、モードが切り替わるステップでソニックを新しい位置に「プッシュ」できます。 ただし、動きはほんの数ピクセルであり、通常のゲームでは完全に感知できません。
別の側面:私が言ったように、固体タイルは高さの配列で構成されています。 ここでのキーワードは「高さ」です。 適切な壁モードでどのように動作しますか? 意外なことに、元のエンジンでは、各ソリッドタイルには2つの相補的な高さがあります。 1つは水平方向に使用され、もう1つは垂直方向の移動に使用されます。
左の壁と天井のモードはどうですか? 高さの4つの配列は必要ありませんか? いいえ、この形式のタイルは高さの通常の配列を使用するため、反転するだけです。 Sonicは、天井モードでは、見つかった高さの値を使用して、上ではなく下に移動する必要があることを認識しています。
これら4つのモードのおかげで、Sonicはあらゆる種類の輪郭、内部および外部曲線などを移動できます。 以下に、角度の値を持つ画像の例をいくつか示します。これらの画像は、私たちが話していることを説明しています。



 壁や天井から落ちる
壁や天井から落ちる右壁、左壁、または天井モードの場合、ソニックは絶対
Gsp値
が 2.5($ 0280)を下回ると
低下します(この時点での
Gspは0に等しくなりますが、
Xspと
Yspは変化しないため、ソニックは空中をその経路に沿って移動し続けます) これは、その下に土地がある場合でも起こります。
スライドバックソニックが上記の方法で落ちると、水平制御ロックアウトタイマーは31($ 1E)に設定されます(ソニックが地面に触れるまでタイマーはカウントダウンしません)。 タイマー値がゼロに等しくなく、ソニックが地上にいる間、彼はプレイヤーがボタン「右」と「左」でソニックの速度を変更することを許可しません。 タイマー値はステップごとに1ずつ減少するため、ロックは約0.5秒続きます。 この時間中、ソニックが地面に落ちた速度と速度だけが動きに影響するため、ソニックはランプを滑り降ります。
空中ステータスソニックが空中にあるとき、角度、
Gsp 、
slpなどについて心配する必要はありません。 必要なのは、地面との接触が検出されるまで
Xspと
Yspを使用して移動し、その後地面モードに切り替えることです。
ただし、ソニックには空中を移動するための珍しいコライダーのセットがあり、詳細に検討する価値があります。
空borneコライダー横型コライダーソニックは地面にいるときと同じように壁にぶつかるはずです。 したがって、水平コライダーの位置は、その位置Yから始まり、X-10からX + 10まで伸びています。 ソリッドタイルとの衝突では、ソニックはタイルの境界にプラス/マイナス11で「押し込み」、地面にいます。
違いは、このコライダーラインが垂直コライダーAおよびBよりも広く、土地の存在を検出することです(もう少し下に戻ります)。 つまり、水平コライダーラインは、
Xspがまったくない場合でも、Sonicが通過したブロックを検出できます。 したがって、極端なエッジに当たると、固体オブジェクトから滑り落ちます。
ソニックが水平コライダーのこの線との衝突を検出すると、彼の
Xspは、壁から離れずに壁に向かって移動した場合にのみリセットされます。 さもなければ、彼は壁にくっついて、それらを通り過ぎて飛びます。
垂直コライダーソニックコライダーAとBは、地上とほぼ同じように空中で動作します。 違いは、ソリッドタイルが検出されたときに、ソニックの高さがすぐにタイルの高さから20ピクセルを引いた値に等しく設定されないことです。 代わりに、この高さは既にその高さより低い場合にのみ設定されます。 そうでなければ、彼は彼に近づいたときに床に張り付いていただろう。
コライダーが彼の足の下までこれまで引き伸ばされた場合、なぜ彼はジャンプするステップで地面を再び発見できず、決して彼が床から落ちないのですか? 簡単です
。Yspがゼロ以上の場合を除き、彼はそれらを無視します。したがって、下に移動するときだけ地球を検出します。
ソニックは空中で上下に動くことができるので、天井とその上にある曲線にヒットできるように、上から2人のコライダー(CとD)がチェックする必要があります。 (CとDはAとBの正確な鏡面反射です-それらは同じX位置と長さを持ち、下向きではなく上向きのみです。)ソニックは天井を検出し、それらから離れ、床とは異なり上下に移動します下に移動したときにのみ検出されます。 下に移動したり、隙間のある壁にしがみついたり、上の曲線の側面にジャンプしたりするときに、「天井」(実際にはブロックの下部)を打つことができます。
床を飛び越えるソニックがジャンプしたときにすぐに飛ぶことができるサイトがあります。 それらは、
グリーンヒルゾーン 、
エメラルドヒルゾーン 、
パームツリーパニックゾーンなどの丘陵緑地でよく見られます。 このようなパッドを構成するソリッドタイルは、AおよびBコライダーによってのみ検出できる特殊なタイプとしてエンジンによってマークされ、CおよびDコライダーと水平コライダーラインによって無視されます。
地球の再発見ソニックが地面にあるとき、
Xspと
Yspは
Gspから取得され
ます 。 落下したり、地面を壊したりする場合、
Xspと
Yspには、空中の軌道を継続するために必要な値が既に含まれています。 しかし、ソニックが着陸するとき、着陸時に利用可能な
Xspと
Yspから
Gspを計算する必要があります。 cos()およびsin()を使用して正確な値を取得すると考えるかもしれませんが、そうではありません。 実際、もっと単純なことが起こり、湾曲した天井にぶつかったときと湾曲した地面に着いたときとでアルゴリズムが異なるので、個別に検討します。
下に移動するとき検出された地球の角度が240〜255($ F0〜$ FF)の範囲にある(およびそれらの鏡面反射が0〜15($ 00〜$ 0F))場合、
Gspには値
Xsp が割り当てられます。 角度が
224-239 ($
E0〜 $ EF)(16-31($ 10〜$ 1F))の
範囲にある場合、
Xspの絶対値が
Yspより大きい場合にのみ、
GspにXspの値
が割り当てられます。 それ以外の場合、
Gspは
Ysp * 0.5 * -sign(cos(
angle ))に等しくなります。 角度が192-223($ C0〜$ DF)(32-63($
20〜 $ 3F))の
範囲にある場合、
Xspの絶対値が
Yspより大きい場合、
Gspは
Xspと等しくなります。 それ以外の場合、
Gspには値
Ysp * -sign(cos(
angle ))
が割り当てられます。
上に移動するとき検出された天井の角度が160-191($ A0〜BF)(64-95($ 40〜$ 5F))の範囲にある場合、ソニックは天井に取り付けられ、
Gspは値
Ysp * -sign(cos(
angle ))を取ります。 角度が96〜159(60〜9米ドル)の範囲内にある場合、ソニックは通常の天井のように頭に当たり、頭に付着しません。
Yspは無効化され、
Xspは変更されません。
ヘルプ:角度の変換Genesis / Mega Driveのゲームでは、角度値は0($ 00)から255($ FF)までの16進形式で使用されるため、円は以前のように360の部分に分割されず、256になります。 GMLなどの他の言語では、反時計回りにカウントされるため、32($ 20)は45°ではなく、315°です。
元の16進数の角度をGMLで使用できる角度に変換するには、次の式を使用します(擬似コードで記述)。
return (256-hex_angle)*1.40625;
注釈- ソニックは、フロアモードでのみ減速(足で「きしむ」)することができます。
- ソニックは、彼の上に低い天井があるとジャンプできません。 X-9からX + 9までのコライダーラインでY-25で衝突が検出された場合、ソニックはジャンプを開始しません。
- ソニックの高さはさまざまです。 春のプラットフォームで立ったり、走ったり、落下したり、離陸したりするときの高さは40ピクセルです。 Y軸に沿った位置は常に中心であるため、常に地面から20ピクセル上にあります(タップすると天井の下に20ピクセル)。 ただし、ジャンプして回転するときの高さはわずか30ピクセルで、地面から15ピクセル上に上がります(また、天井から15ピクセル下に下がります)。 ソニックがスピンまたはジャンプするステップでは、スライダーがY位置に5を追加します。したがって、スライダーが短くなり、中心が位置を変更しても、下のポイントの位置は変更されません。 ジャンプ後に回転が完了するか着陸すると、Yから5ピクセルが差し引かれます。カメラシステムもこのオフセットを考慮する必要があります。そうしないと、ソニックの高さが変わるとビューも変わります。
- このレビューで説明されているコライダーA、B、C、およびDは、座標X-9およびX + 9にあります。 これは、歩くとき、落下するとき、ばね台から離れるときなどにのみ当てはまります。常にボールに折り畳まれていないときです。 ソニックがスピンまたはジャンプする場合、それらは座標X-7およびX + 7にあります。 ただし、水平コライダーラインは常に同じままです。
更新:小数値を追加しました。