投資家に美しいロボットを見せるためには? 美しいボディをデザインします。 投資がないときにこれを行う方法は? 私は自分の道を簡単に説明しようとしました。 私は
練習場でゴルフボールを集めるロボットを開発
しています 。 現在、この問題を解決するためにロボットを販売している企業は1社だけで、コストは15,000ドル以上です。 市場は非常に有望で、プロジェクトをDIYからテクノロジースタートアップに変えました。
包装がなければ、その違いを感じるのは非常に困難です。 この記事では、
4727ルーブルの方法を説明します
。 1000mm x 800mm x 250mmのケースを入手します。

ロボットの最初のバージョンにはボディが必要ですか?
ロシアの潜在的な投資家に、ゴルフ練習場でゴルフボールを集めるロボットとは何ですか? ほとんどの場合、ゴルフとは何か、ドライビングレンジ、ボールを収集する理由、ロボットがサンドトラップに落ちない理由、ゴルフカーに当たらない理由などから始める必要があります。
ゴルフとゴルフ練習場とは何ですか?ゴルフはスポーツゲームです。 主な目標は、より少ないストロークで各フィールドの穴にボールを転がし、より少ないストロークですべてのフィールドをパスすることです。 私たちの国では、ゴルフの開発は非常に不十分であり、残念です。 このゲームは非常に興味深いもので、人々が新鮮な空気の中で時間を過ごし、ゲーム中にコミュニケーションをとることができ、あらゆる年齢層に適しています。 このゲームでは、ハンディキャップの成功を明確に測定します。これは、アスリートの資格の数値指標です。 これらすべての要因により、ゴルフはストリーミング活動になります。 あなたがゴルフを試していない場合-それは時間です!

初めてからフィールドの終わりまで、つまりホールの近くでストライクするには、長く正確なストライクができなければなりません。 ドライビングレンジは、ロングおよびミディアムゴルフショットを練習するためのトレーニングフィールドです。 これらのフィールドは次のようになります。

ビデオを表示する最も簡単な方法は、その仕組みです。 それは合板の箱を見ただけで、不本意な笑顔が全員の顔に現れ、会話は建設的ではなくなります。 これは、欧米の投資ファンドの申請書を作成する際に、同様に鋭く感じられます。
将来的には、ボディは
射出成形で製造される予定ですが、金型の製造コストはスタートアップにとって大きな障壁です。
ガラス繊維ハウジングの設計
まず第一に、エポキシを含むグラスファイバーを接着するフォームを開発する必要があります。 マトリックス(カウンター形式)を作成することを好む人もいます。
最も低予算のオプションは、発泡スチロールから得られます。 必要なサイズのブランクに接着し、CNCフライス盤で加工できます。 簡単な方法を探しているのではなく、目標は予算を作ることです。
彫刻粘土からでもモデルを入手できますが、彫刻家が私の平凡であることに気付いたので、私はより技術的な方法で行くことにしました。
私は建設現場からのタイルのりの残骸からお母さんの彫刻を持っています
説明:これはレオです。
既存の3Dモデルをフォームの厚さに等しいレイヤーにカットします。私の場合は30mmです。
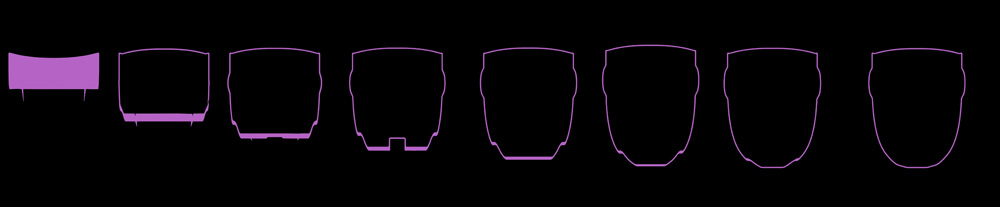
結果の画像をフォームに転送してカットする必要があります。 これは、大判印刷を使用して紙から行を転送することで実行できます。 プロジェクターを使用することにしました。 この方法は、画像を壁に転送するのにも役立ちました。

転送後、線に沿って発泡シートを切断します。
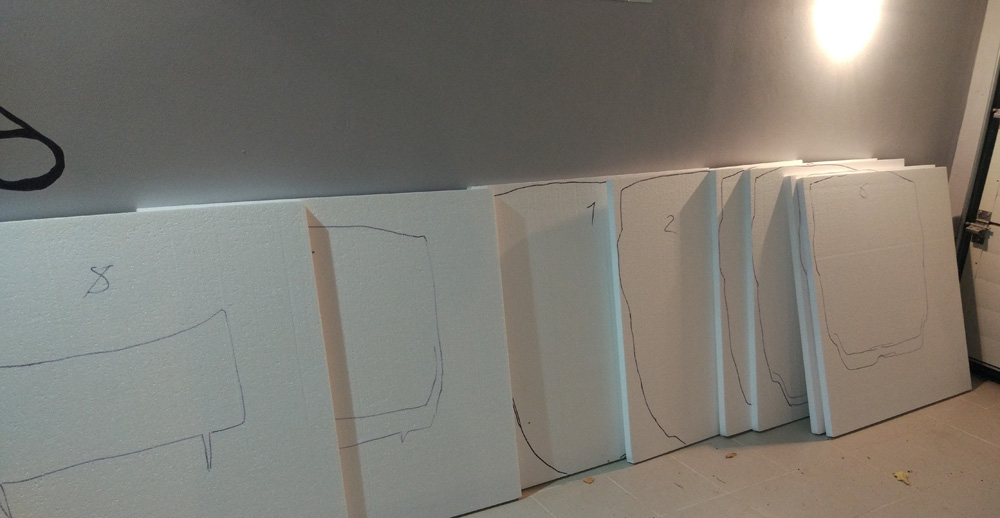
レイヤーを一緒に接着します。

フォームをプラスチシンに揃えることができます。 私は最も簡単な方法を選びました-しがみつくフィルムで覆います。

必要な形状が得られたら、すべてをテープで接着します。エポキシが接着しないことを望み、ワークを何度も使用できます。

混合物の粘度と寿命を改善するには、樹脂と硬化剤を室温にする必要があります。 均一な色に混ぜます。

グラスファイバーではなくグラスファイバーを使用するのが最善です。 グラスファイバーでは、繊維は単純にランダムにカットされ、金型によりよくフィットします。

ガラスマットを細かく切り、ガラスマットの層を置き、エポキシ樹脂でブラッシングします。 一度に最大3つのレイヤーを繰り返すことができます。 その後、12時間乾燥させる必要があります。 ポリエステル樹脂を使用することもできますが、臭いはひどく強いです。

部品の必要な厚さを得ることができる層の数。 層間の接着性は良好です。

結果のフォームはパテできます。 硬化剤を含むエポキシベースのパテが必要です。

乾燥後、パテをサンディングします。

プライマー。

そして、適切な色でペイントします。
ケースは望ましい形状であることが判明しました。 表面にはいくつかの欠陥があります。 それはそのような最初の経験でした。 ケースは、最小限のコストでほぼすべての形式で作成できます。これはこの技術のプラスです。 私はこの建物で5晩過ごしましたが、追加の建物ごとにほぼ同じ時間を要します。これは大きなマイナスです。
費用
合計:4727こする。この場合、後続の各建物の費用はほぼ同じで、同じ時間を要します。 800x1000x250ロボット用の超低予算住宅の準備が整いました。
ご清聴ありがとうございました!次の記事では、23,000ルーブルの真空成形によるボディの開発を紹介します。 + 1500こする 各ケース。
あなたの助けが必要です:
- arduino、pythonのプログラミング;
- 航続距離のテスト;
- 法的問題、ロボットの国からの輸出、特許法;
- スタートアップパッケージング、投資検索。
ボディとメカニクスは
NikitaKhvorykによって設計されてい
ます 。
n12eq3モジュール用の接続ボード。
手伝いたい場合は、PMまたは
VK 、
FBで私に書いてください。
近い将来、アルゴリズムと設計を完成させます。 5つのロボットを作成し、新しいシーズンの長いテストのためにゴルフクラブに無料で配置します。

読んでくれてありがとう、そして私を完全に批判してください。