この記事では、構造モデリングの標準ライブラリに基づいてコントローラーモデルを作成します(ファジー制御ブロックの既製ライブラリを使用せずに)。
制御オブジェクトとして、V.I。のガスタービンエンジンのモデル Gosteva「自動制御システムのファジーレギュレーター」
PIDおよびSDAレギュレーターと比較してみましょう。
問題の声明
ガスタービンエンジン(GTE)とターボジェットエンジン(ターボジェットエンジン)の違いは、GTEがすべてのエネルギーをシャフトから除去することです。 ターボジェットエンジンでは、エネルギーはジェットストリームの形で放出されます。
ガスタービンエンジン(GTE)は、ガスポンプユニットおよび航空機の発電所の基礎となるガスおよび航空産業、ピークおよびモバイル発電所の産業用電気ターボ発電機の駆動、海洋発電所および大規模な設備容量の開発が必要なその他の産業施設で広く使用されています(1から25 MW)、最小重量と寸法の1つのユニットで。
ガスタービンエンジンには、運転中の信頼性、エネルギー効率、安全性、環境への配慮に関する一連の要件が課せられます。 これらの要件に加えて、ユニットの起動に関連する過渡現象の品質の要件、選択した負荷(電力)の急激な変化が関連しています。 多くの点で、これらの要件を満たすことは、ガスタービンエンジンの自動制御システム(ACS)にあります。
産業で使用される典型的なガスタービンエンジンはターボシャフトエンジンで、その回路を図1に示します。
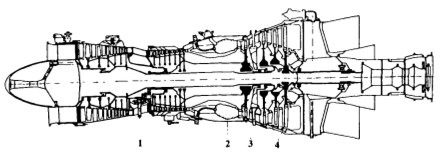
図1.典型的な産業用ガスタービンエンジンのスキーム:
1-コンプレッサー; 2-燃焼室; 3-圧縮機タービン; 4-パワータービン。
エンジンは、空気がコンプレッサー1で圧縮され、空気に供給された燃料が燃焼室2で燃焼する回転機械です。エネルギーの一部は、コンプレッサー3タービンの高温ガスから取り出され、コンプレッサー1ドライブで消費され、パワータービンの4ガスです拡大すると、消費者がエンジンから動力を得ることができます。
ガスタービンエンジンの大部分では、ローター速度は制御された量です。 ACSの制御要因として、ローター速度nが燃焼室内の燃料消費量GTに使用されます。 さまざまな動作モードで、さまざまな外部条件下で、エンジンパラメータが大幅に変化します。
ロータ速度がn制御変数であり、燃料消費G Tが制御アクションである非定常制御オブジェクトとしてガスタービンエンジン(GTE)を考えます。 タービンモーメント-M Tおよびコンプレッサーモーメント-M Kのローター速度への依存性を線形化し、特定の動作モードに対するエンジンの熱容量および質量容量の影響を考慮せずに、エンジン伝達関数を次のように書き留めます。
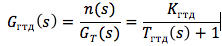
ここで、ゲインと時定数は次のように定義されます。

さらに、入力信号と出力信号は、定常状態からの相対的な無次元偏差で記録されます(n =Δn/ n 0 ; G T =ΔG/ G TO 、パラメータの基本値は、特定のエンジン動作モード(たとえば、定格または最大)で選択されます)。 さまざまな動作モードおよびさまざまな外部条件下で、エンジンのゲインと時定数は大幅に変化するため、各モードでは、K GTDおよびT GTDの独自の値を決定する必要があります。
ガスタービンエンジンなどの非定常制御オブジェクトのガスタービンエンジンの伝達関数Gは、オブジェクトパラメータのかなり緩やかな変化の条件下で係数を「凍結」する方法によって取得されることに注意してください。
エンジンのローター速度を自動的に制御するアナログ電気機械システムのブロック図を図2に示します
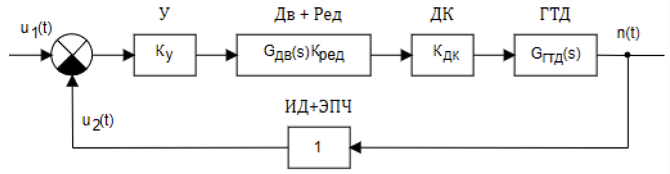
図2.アナログSAR GTEのブロック図
回転周波数は電圧u 1 (t)によって設定され、パルスIDセンサーによって変更されます。パルスIDセンサーの出力信号の周波数は次の式で決定されます。
f = kmn。ここで、nはエンジン速度、mはギアの歯数、kはギア比です。 EPCの電子周波数変換器を使用してID出力から取得した交流電圧は信号u2(t)に変換され、その値はエンジン回転数-nに比例します。 アンプUが2相非同期モーターDvに供給された後、電圧u2(t)が基準電圧およびエラー信号と比較され、ギアボックスRedを介してDCのスロットルバルブを調整し、ガスタービンエンジンに入る燃料の流量を変更します。 パルスセンサーと電子周波数変換器は、伝達関数が1に等しい比例リンクで記述できます。 この場合、システム自体に単一のフィードバックがあります。
アンプ、誘導モーター、スロットルバルブ、ガスタービンユニット、および一般的な制御オブジェクトとして電子周波数コンバーターを備えた周波数センサーのシリアル接続を考慮し、デジタルファジーレギュレーターを使用すると、図2のブロック図全体を図3のブロック図に縮小できます。リンクの伝達関数は、共通の伝達関数G 0 (s)に削減されます。
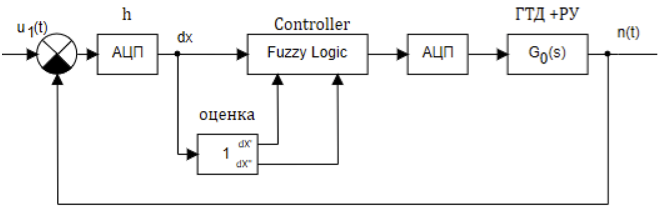
図3.ファジーコントローラーを備えた制御システムの構造。
一般的な伝達関数G0(s)は、次のように記述できます。
G 0 (s)= G (s)K EDIT TOG (s)=α[s(s + a)(s + b)] -1α=abKKからKへの編集 、
a = 1 / T DW 、
b = 1 / T GTE
たとえば、伝達関数の動作時間への依存性は次の値を取ると仮定します。
T GTD (t)= 0.9849-0.1188×t + 0.0063×t 2-0.00012×t 3 ;
α(t)= 16.5475-4.4469×t + 0.4843×t 2-0.02315×t 3 + 0.0004×t 4 ;
T DW = 0.35秒
制御システムの研究では、ガスタービンエンジンのローターの回転速度を変更する所定の関数は、入力電圧u(t)によって指定されると仮定します。
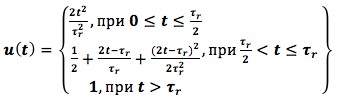
ここで、τrはエンジンの加速時間です。 τr = 6秒かかります。
動的モデルの作成
エンジンの簡略化されたモデルを図4に示します。このモデルでは、上記の依存関係のシミュレーション中に変化する典型的なブロックの変数パラメーターを使用します。
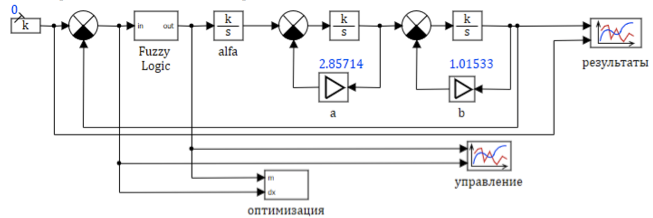
図4.ガスタービンエンジンモデルの構造図
アルファ、a、bアンプの係数は、スクリプト言語、以下のプログラムテキストを使用して計算されます。
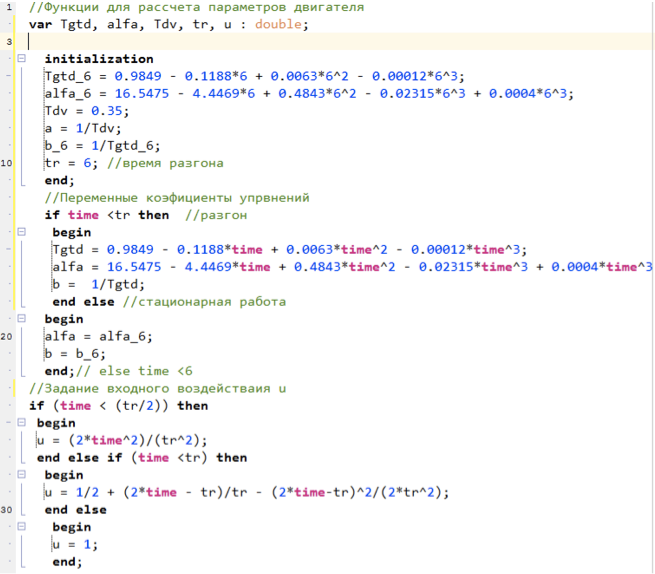
図5.モデルパラメーターを計算するためのスクリプト。
ファジーロジックコントロールノブ
制御レギュレーターは、設定値とモデルから取得した値の不一致の入力を受け取り、制御アクションを計算する必要があります。
特殊なライブラリを使用せずに、構造モデリングの数学的に標準的なブロックのみを使用して、ファジーロジックに基づいてコントローラーを組み立ててみましょう。
ファジーロジックに基づく制御の原則の説明は、Haberに関する以前の記事 、またはここでブロックの特殊なライブラリを作成する説明 (慎重に、冒とく的)で見つけることができます。
ファジーロジックに基づくコントローラーは、次の一連の変換を実行します。
- 入力変数のフェーズ。 変数の値は一連の用語に置き換えられます。
- ファジーロジックのルールの結論のアクティブ化。
- 各言語変数の結論の蓄積。
- 出力変数の難読化。
エンジンを制御するには、1つの信号に基づいて計算される3つの連続変数を使用します。
- 逸脱
- 微分偏差(変化率の変化);
- 偏差の二次導関数(偏差の変化の加速)。
計算スキームを図6に示します。
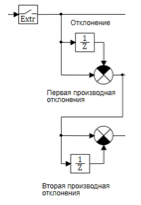
図6. 1次および2次微分偏差の計算。
外挿ブロックは、0.01秒の周期でコントローラーに入る信号を量子化します。 一次および二次導関数は、差分式を使用して計算されます。
 ここで:
ここで:
u(t)は、時刻tでの現在の偏差です。
u(t-Δt)は、時間t-Δtでの偏差です。
u '(t)は、時刻tにおける偏差の導関数の現在の値です。
u '(t-Δt)は、時間t-Δtにおける偏差の導関数の値です。
u ''(t)は、時間tにおける偏差の2次導関数の現在値です。
u ''(t-Δt)は、時間t-Δtにおける偏差の2次導関数の値です。
Δtは量子化周期です。
Δtによる除算は、比較ユニットで実行されます。
このブロックの作業の結果、3つの言語変数が作成されます:偏差、最初の偏差変数、2番目の偏差変数。
ファジー制御の問題を解決するために、各言語変数に対して2つの用語のみを使用します。
偏差- 少ない、多い;
偏差の一次導関数は減少、増加しています。
偏差の二次微分- 減速、加速します。
各項のメンバーシップ関数μの値を計算するには、飽和の線形関数を使用します。 項のこの関数は、入力値が最小の場合は0を超え、入力値が最大の場合は1を超えます。 項が少ない場合、この関数は、変数が最小値に等しい場合に値1をとり、変数が最大値にある場合に値0を取ります。 (図7を参照)

図7.ますます少なくなる用語のメンバーシップ関数。
したがって、3つの入力変数(偏差、偏差の1次導関数、偏差の2次導関数)のそれぞれについて、2つの項が多かれ少なかれ、入力の値に応じて0から1に線形に変化するメンバーシップ関数μiの値があります変数。
出力言語変数として、出力効果を使用します。これには、減少と増加の 2つの用語しかありません。
図のモデル図から 4偏差が0より小さい場合、値は指定された値よりも大きく、小さくする必要があることは明らかです。 偏差が0より大きい場合、関数は指定されたものより小さく、増加する必要があります。
2つの用語の論理規則は次のようになります。
- 少なくなり、 減少し 、 減速する場合 => 減少します。
- さらに 増加すると加速します => 増加します。
ファジー推論ルールを有効にするには、ファジーおよび演算子の最小関数を使用します。 出力関数の項のメンバーシップ関数の値は、式によって計算されます。
μ
減少 = MIN(μ
減少 、μ
減少 、μ
減速 )
μ
増加 = MIN(μ
以上 、μ
増加 、μ
加速 )
用語を特定の影響値(累積およびデナジ化)に確実に変換するために、ポイントの重心として塚本アルゴリズムを使用します。
 どこで
どこで
u cは結果の関数です。
u iは、項iの関数の値です。
μiは、関数の項のメンバーシップ関数の値です。
私たちの場合、2つの項の結果の関数は次の式で計算されます。

ファジー推論アルゴリズムの一般的なスキームを図8に示します。
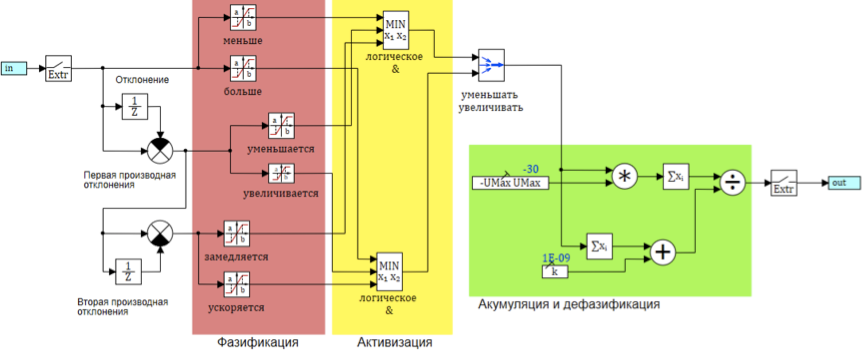
図8.ファジー推論アルゴリズムの図
このアルゴリズムが機能するためには、3つの言語変数の6項の最小値と最大値を設定する必要があります(偏差、偏差の1次導関数、偏差の2次導関数)。 計算を減らすために、偏差はゼロに関して対称であると仮定します。 次に、変数ごとに1つずつ、3つの絶対値を見つけるだけで十分です。
deltMax-最大偏差。 用語の値をless、more(-deltMax、deltaMax)に設定します。
divMaxは、偏差の最大導関数です。 項の値を減少、増加(-divMax、divMax)に設定します。
div2Maxは最大二次導関数です。 項の値を減速、加速(-div2Max、div2Max)に設定します。
uminとumaxの最大効果と最小効果は設計機能によって決定され、この例では+30と-30に等しくなります。
最適化によるレギュレーターの設定。
係数を選択するには、ファジーロジックを使用した以前の実験で使用したものと同じ最適化スキームを使用します。
最適化基準として、0.001以下の標準偏差と25以下のコントロールユニットのスイッチング数を採用します。スイッチングについては、制御アクションの符号を変更します。
コントローラー設定ブロックの回路を図に示します。 9。
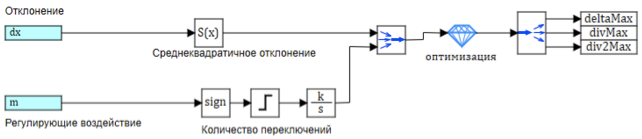
図9.ファジー出力パラメーターの構成。
ユニット操作の結果、次のパラメーター
deltMax = 0.00746;
divMax = 0.2657;
div2Max = 25.13;
移行結果を図10に示します。
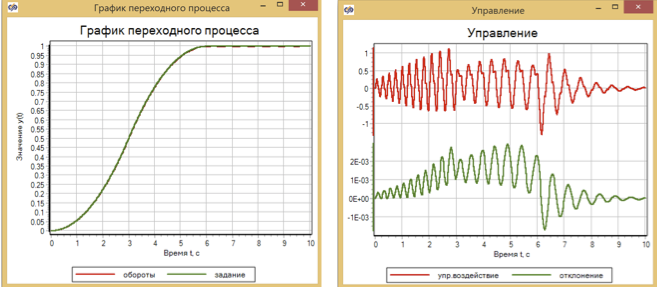
図10.ファジーロジックを使用した過渡およびモーター制御。
最適化後のセットからの回転の最大偏差は2.5×10 -3でした。 これは、原則として悪くはありませんが、V.I。 設定後のモデルのゲスト偏差は2桁小さくなりました。最大値は5×10 -5でした。
比較のために、単純化されたエンジンの同じモデルについて、PIDコントローラーの動作の結果を図11とトラフィックルールの図12に示します。 これらのレギュレーターのパラメーターも、最適化手法によって選択されました。
その結果、ファジーロジックに基づくコントローラーよりもPIDコントローラーで大きな偏差が得られます。約6×10 -3であり、2次導関数を使用する交通コントローラーでは、偏差は約3×10 -3です (13を参照)。 同時に、すべてのグラフで、所定の効果が変化すると(セクション3秒、6秒で変化)、規制の質が変化することがわかります。
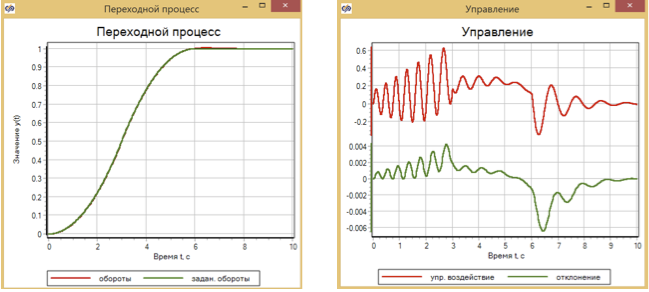
図11. PIDコントローラーを使用した過渡およびモーター制御。
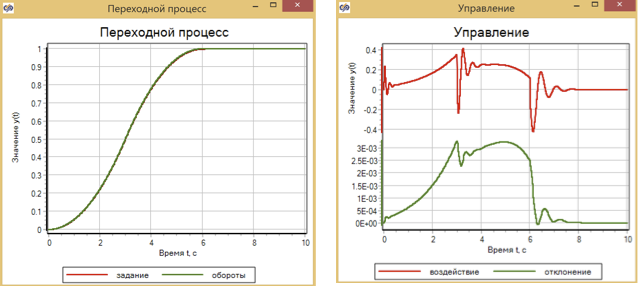
図12.交通管制官の助けを借りた過渡プロセスとエンジン制御。
エンジンを始動するには、速度の滑らかな変化の形で遷移関数が使用されます。 また、この法則に基づいて最適な制御を行うための最適化手法によりレギュレーターを調整しました。 段階的な効果を適用して、最初はスムーズな移行プロセス用に最適化されたレギュレーターがどのように対処できるかを見てみましょう。
効果として、プロセスの3秒で0から1までのステップを使用します。
実験結果を図13-15に示します。
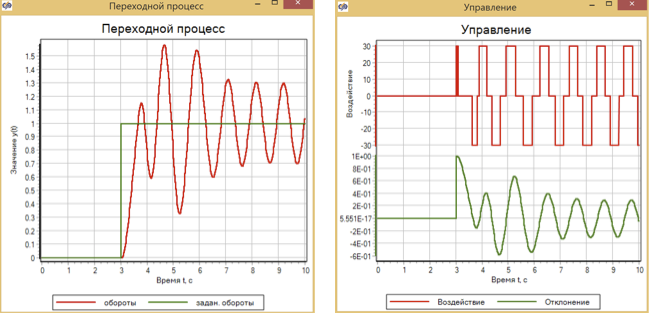
図13.ファジーロジックコントローラーを使用した段階的な制御アクションによる過渡と制御。
段階的に影響を受けると、エンジンをスムーズに加速するように構成されたレギュレーターが制御に対処できず、システムが自動発振モードに入ることがわかります。
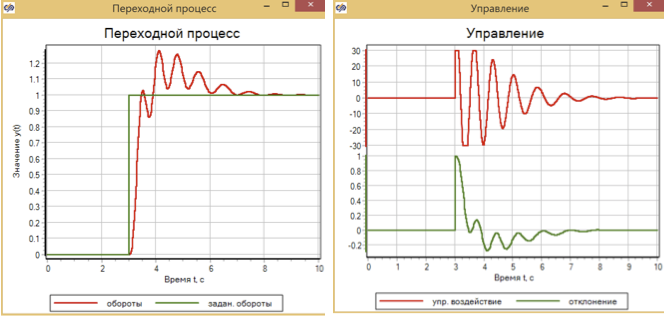
図14. PIDコントローラーを使用したステップ制御による過渡および制御。
段階的な効果で滑らかなプロセスに調整されたPIDコントローラーは、所定の時間への移行を提供しますが、同時に30%のオーバーシュートと4秒以内の振動プロセスがあります。
スムーズな規制のために構成された交通コントローラは、段階的な露出中にオーバーシュートのないスムーズな移行を提供します(図14)
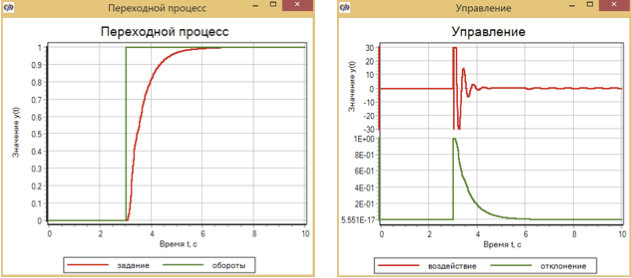
図15.交通コントローラを使用した段階的な制御アクションによる移行プロセスと制御。
結論
これらの数値実験は、ファジーロジックに基づいたコントローラーが、PIDやSDAよりも設定値の滑らかな変化を伴う単純なエンジンモデルの回転のより正確な制御を提供することを示しました。
ただし、そのような設定は、判明したとおり、段階的なアクション中のレギュレーターの安定性を保証するものではありません。
さらに、簡略化されたエンジンモデルの場合、段階的なアクションの場合のファジーロジックに基づくコントローラーは、PIDまたはSDAコントローラーよりも悪いことが判明しました。
自習用の記事のプロジェクトを含むアーカイブへのリンク