デバイス「Bereshit」にはどのエンジンがインストールされていますか? どの科学機器が搭載されていますか? 月に到達するために、装置はどのような操作を行う必要がありますか? 飛行から47日間で何キロ飛ぶのでしょうか?
Bereshitミッションに関する以前に公開された資料: 月の装置を1つの小さな民間企業の力と手段だけで宇宙に送ることは不可能ですが、国際宇宙コミュニティの助けを借りて、このアイデアを現在実装されている本格的なプロジェクトに変えることができます。
Bereshitミッションに関与するプロジェクト参加者:-SpaceILの若いイスラエルの科学者とエンジニアのチーム、
-NASA(米国)、
-ISA(イスラエル宇宙庁)、
-IAI(イスラエル航空産業懸念)、
-Spaceflight Industries(米国、軌道へのBereshit装置の打ち上げのオーガナイザー)、
-SpaceX社(米国、Falcon 9ブースターロケット)、
-スウェーデン宇宙公社(スウェーデン宇宙公社)、
-Cobham(スウェーデン)社、
-会社Ramon Chips(イスラエル)。

結局のところ、SpaceILは世界標準の小さな組織であり、約200人の従業員を擁しています。そのほとんどは、「イスラエルの技術的および科学的進歩の発展を促進する」ボランティアの科学者およびエンジニアです。
写真では、ダニエラ・ジェロンはSpaceILのエンジニアです。

Bereshitプロジェクトの実装のためのすべてのアクションの開発、準備、および組織の総費用は1億ドルです。
これは商業的なプロジェクトではありません。例えば、NASAはイスラエルの会社SpaceILとの仕事から金銭的利益を得られず、そのような緊密な協力によりNASAはBereshit磁力計から貴重な科学情報を受け取ることができるからです。
「このタイプの協力は、どの当事者にとっても有益です。 月と火星の探索を成功させるには、パートナーが必要です。 NASAの研究システム開発担当副ディレクターであるスティーブクラークは、次のように述べています。
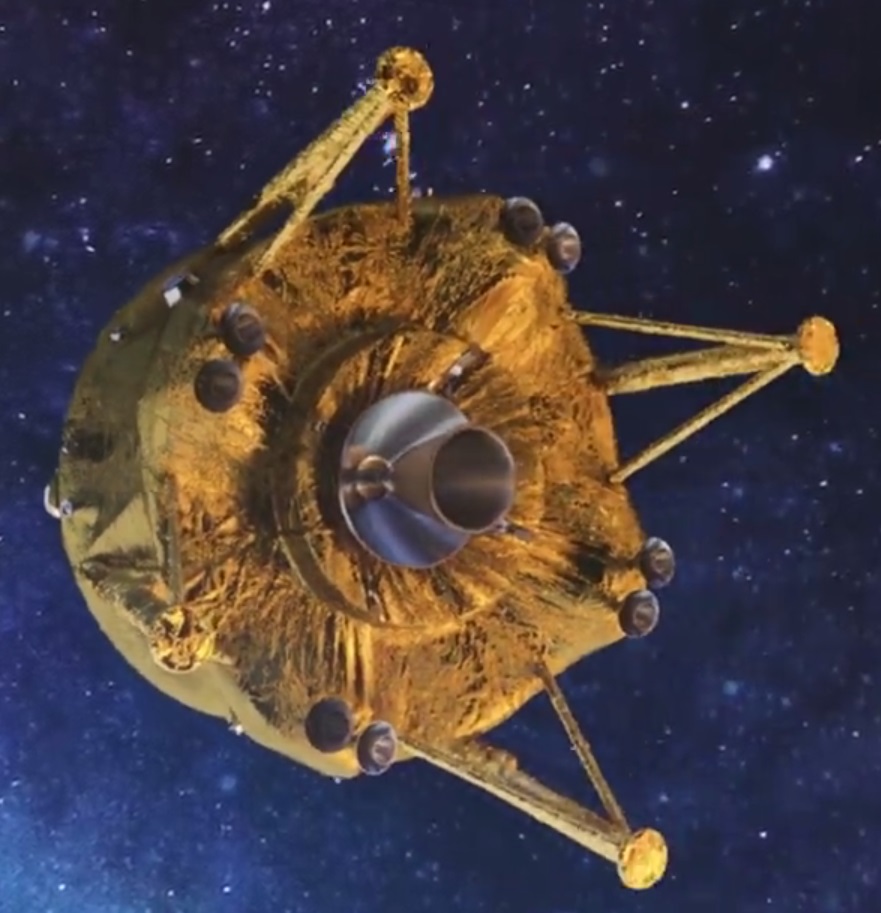
最初の民間月面車両「Bereshit」のコンポーネント一般的な特徴:
-Bereshit装置の高さは約1.5メートル、直径2メートル(着陸サポート間の2.3メートル)です。
-重量585キログラム(燃料あり)(燃料質量-390 kg)、燃料なし195 kg
実際、燃料の質量と装置の質量に関するデータは異なり、燃料のない装置の質量は150 kgまたは160 kgであることが示されていますが、総開始質量585 kgの数値はすべての材料でほぼ一定です。
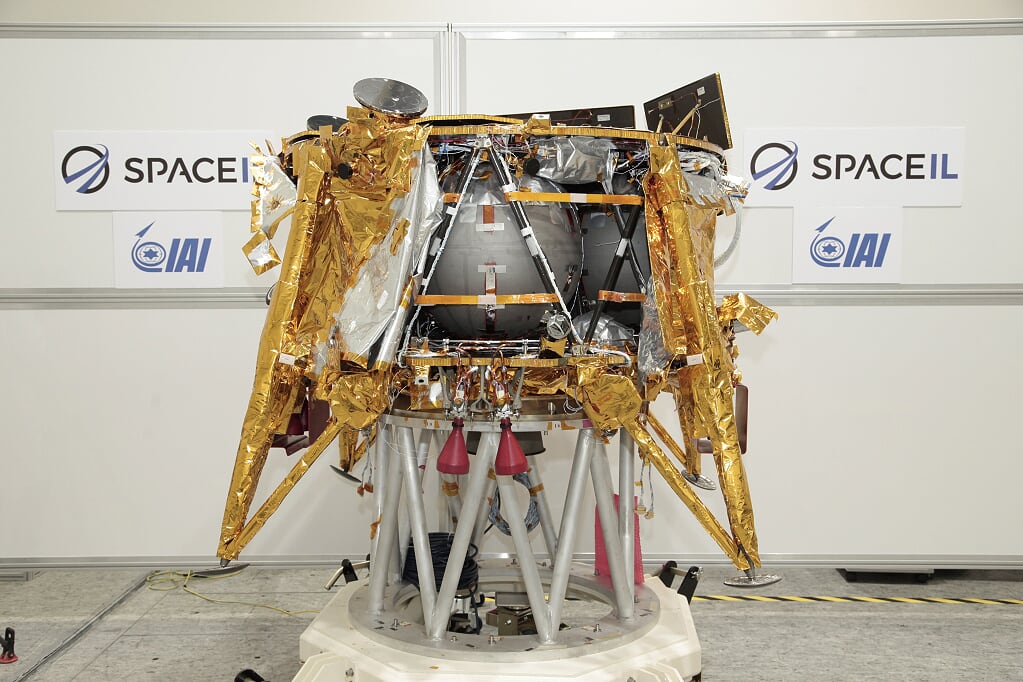
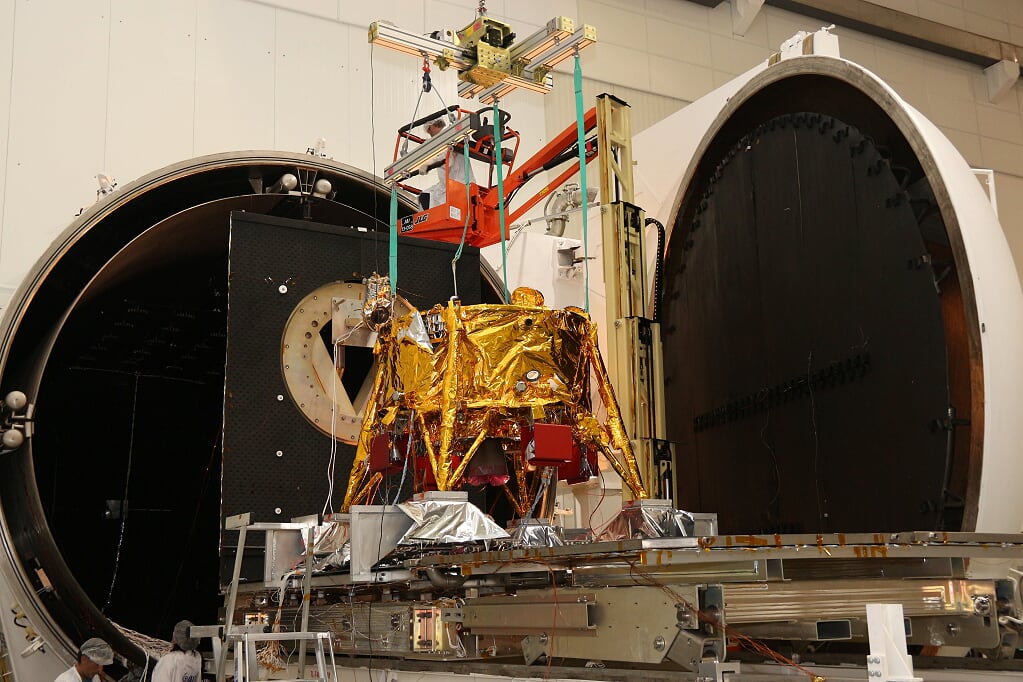
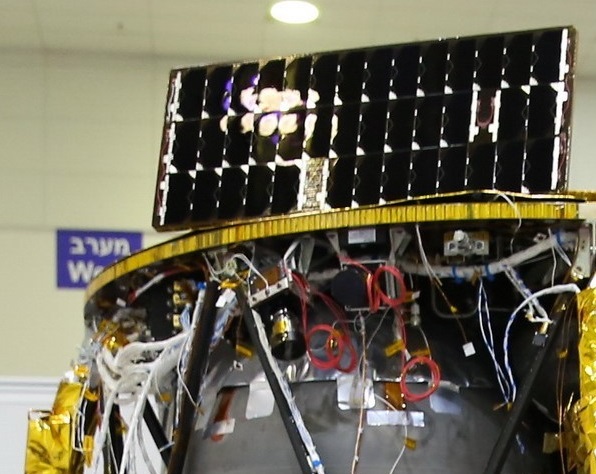
要素のテストと打ち上げの準備の最終段階でのデバイス「Bereshit」:
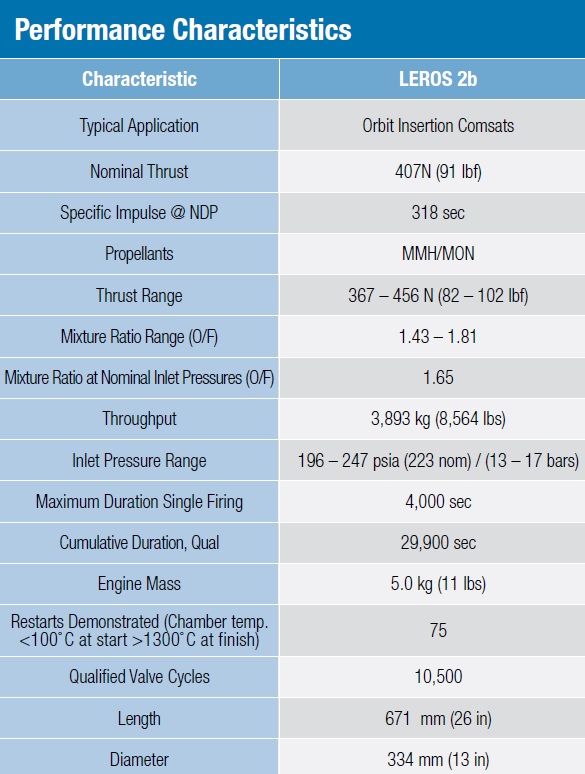
 1.エンジン。
1.エンジン。Bereshit装置のエンジンは、特別に適応されています(Bereshitミッションでは、ノズルを短くして推力を増加させることにより修正されました)LEROSファミリーの化学ミサイルユニット(衛星プラットフォーム用)-推力のあるヒドラジン(モノメチルヒドラジン)のLEROS 2b修正45 kgf(441H)。これは、41.5 kgf(407H)での通常の特性よりわずかに大きくなっています。

 2.オンボードエレクトロニクス。
2.オンボードエレクトロニクス。 Cobham GaislerのHiRel GR712RCプロセッサ
Cobham GaislerのHiRel GR712RCプロセッサオンボードコンピューターの主要な要素として、Bereshit装置はCobham
デュアルコアGaisler HiRel GR712RCプロセッサーを使用しています 。
技術的には、このチップはLEON SPARCに基づいており、独自の耐放射線性シリコン技術を使用して製造されています。
SpaceIL
はこのプロセッサの最初の顧客になり、SpaceILのエンジニアは実際の配信前に特別なソフトウェアを作成してBereshitデバイスで実行しました。
GR712RCは、デュアルコアプロセッサLEON3FT SPARC V8です。 軍用周波数の全範囲で最大125 MHzの周波数で動作できます。 これにより、最大300 DMIPSと250 MFLOPSのピークパフォーマンスが実現します。 SpaceWire、CAN、SatCAN、UART、1553B、イーサネット、SPI、I2C、GPIOなどを含む高度なインターフェースプロトコルを統合します。 外部メモリSDRAM / SRAM / PROM / EEROM / NOR-FLASH用の高速インターフェースバスを備えています。 実証済みの耐放射線性-最大300度 低消費電力。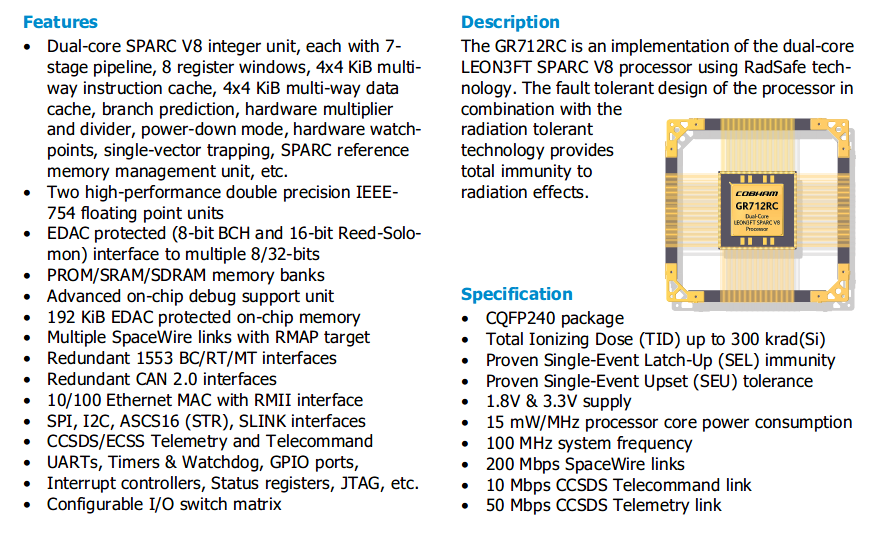
 amartology からのコメントに
amartology からのコメントによる
と、 このプロセッサの
魅力は、最も一般的な市販の技術(TowerJazz 180 nm、イスラエル製)を使用して製造されているという事実に あり ます。 製造工程が特別に開発された場合よりも1つか2つ安くなる、回路や要素のトポロジーにより、技術を妨げることなく喜びを保証します。3.オンボードカメラ。Bereshit搭載カメラは、Ruda光学系を備えた8メガピクセルの
Imperx Bobcat B3320Cです。
デバイス上のカメラの数:6個。

そして、このカメラの最初のフレームは、ベレシット装置の月への飛行中に撮影されたはずであり、着陸後(もちろん、このカメラは着陸手順も撮影します)、すべてがうまくいけば、月にそれをキャプチャする予定です過熱の結果として故障前にカメラがどれだけの量を作ることができるかの最大フレーム数を表面化する
BereshitプロジェクトのMCCのデバイスのカメラからのテレメトリーとデータは、スウェーデンの同僚とスウェーデン北部の
キルナにある
科学および宇宙センターの機器の助けを借りて取得されます。
組み立てプロセス中のカメラのビュー:
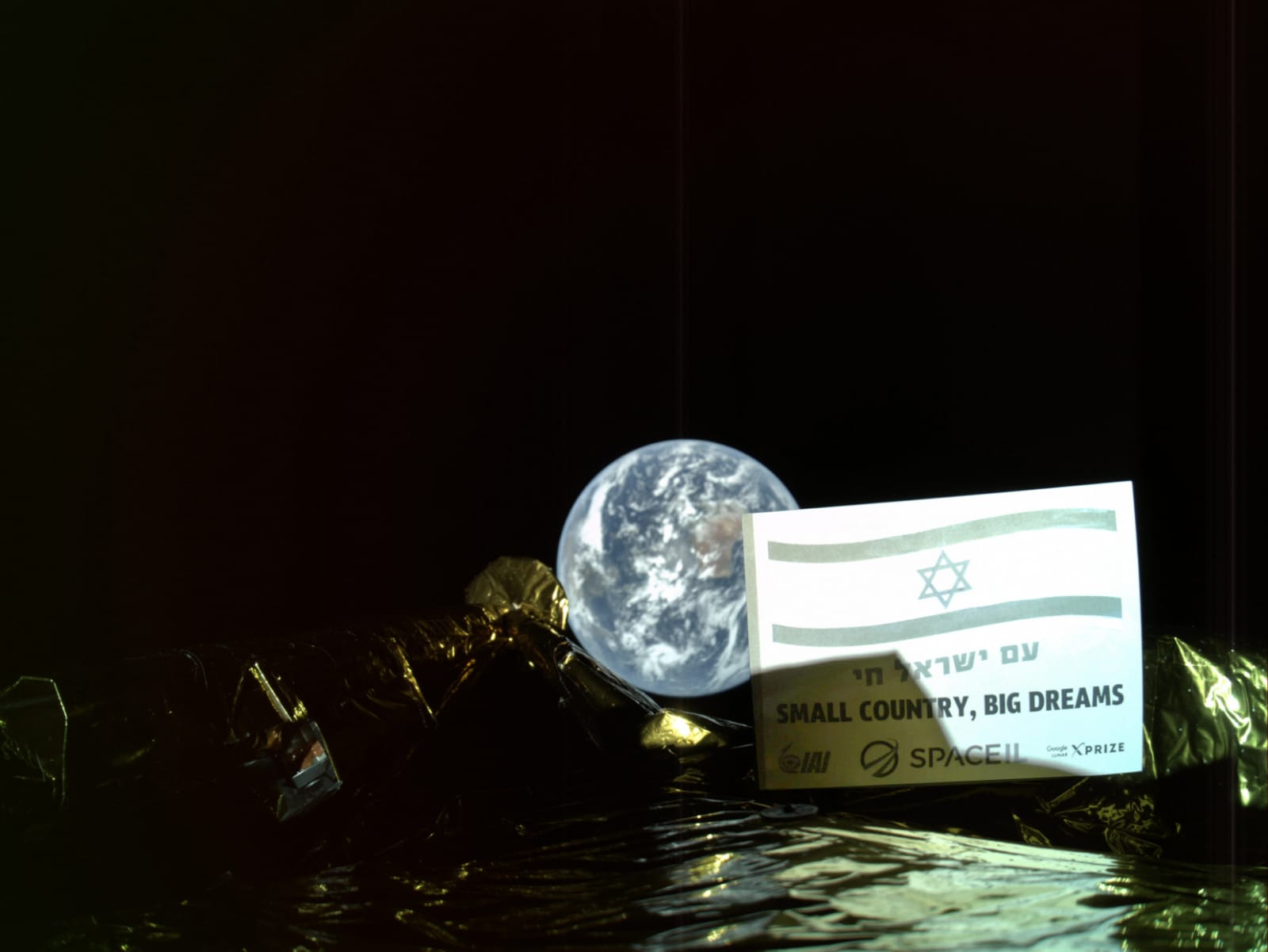
ここでは、
この出版物の最初の写真のあるカメラとプレートがどのように配置されているかを写真で見ることができます。
 4. Bereshit装置に搭載された科学機器:
4. Bereshit装置に搭載された科学機器:磁力計(メーカー-ワイズマン研究所、イスラエル)がBereshit装置に搭載され、その助けを借りて、着陸ゾーンで月の磁場の一連の測定を行うことが計画されています。
また、レーザーコーナーリフレクター(メーカー-ゴダード宇宙飛行センター、米国)のアレイがBereshit装置に取り付けられています。
これは、コンピューターのマウスより小さいサイズの反射板の写真です。
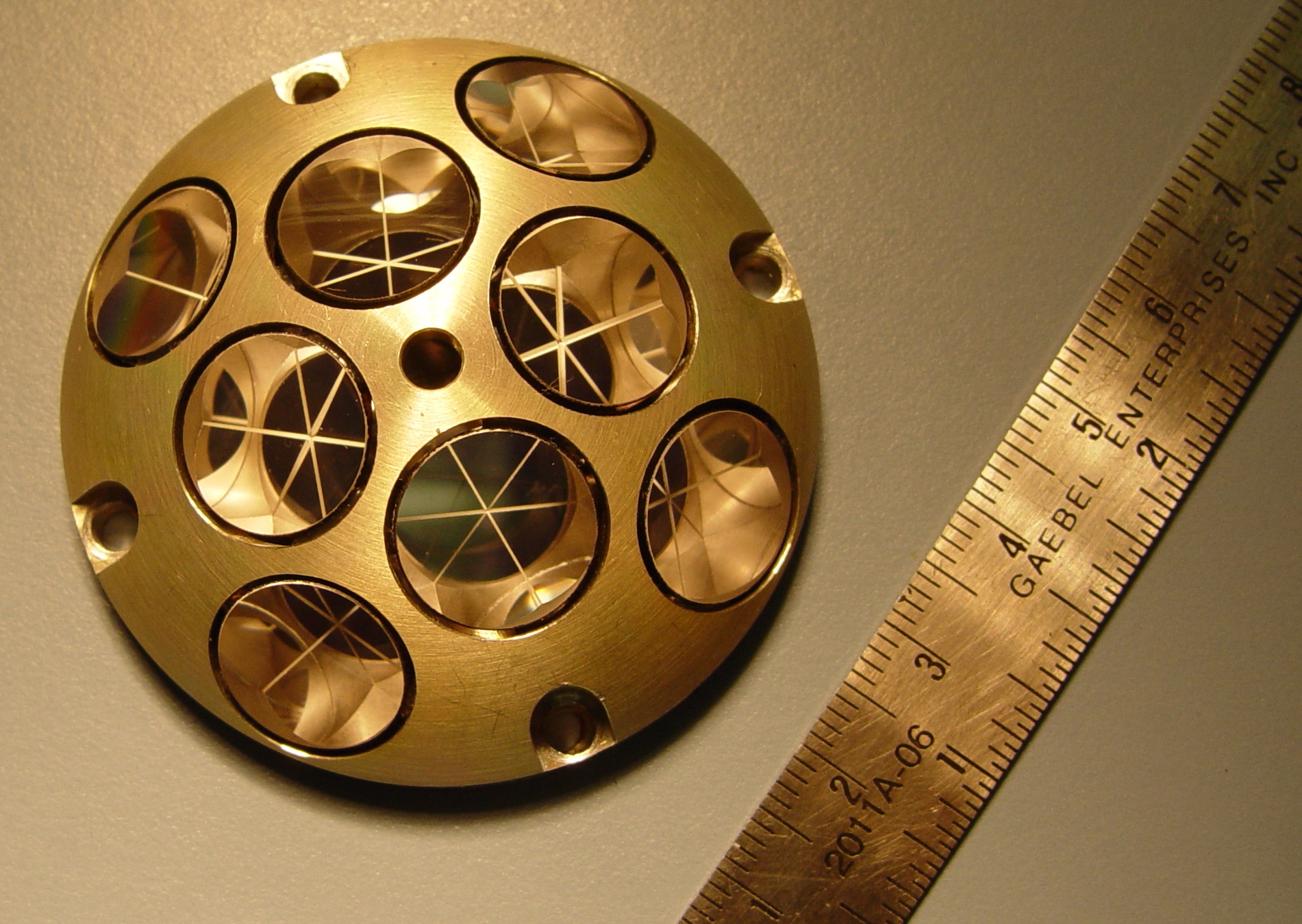
この計器には、ドーム型のアルミニウムフレームに8つの反射面が取り付けられています。 この構造により、デバイスはいずれかの側からの光を反射して光源に戻すことができます。
高度マップを編集するように設計されたレーザー高度計LRO(NASA月軌道プローブ)は、レーザー光パルスをBereshit角度反射器に送信し、光が戻るまでにかかる時間を測定します。
この技術を使用して、NASAとSpaceILのエンジニアは、10センチメートルの精度でBereshitデバイスの位置を特定できるように計画しています。
また、Bereshit装置が着陸手順を実行すると、LRO(NASA月軌道プローブ)がメイン液体エンジンの「排気ガス」を分析します。
LROプロジェクトのNASA科学者ジョン・ケラーは、次のように述べています。「私たちのチームは、「車両のエンジンから放出される物質が月面上でどのように振る舞うか」を確認しようとします。
5.通信およびデータ交換システム(テレメトリーおよび制御)。SpaceILには独自の宇宙通信センターがないため、地球上のMCCと宇宙のBereshitデバイス間のデータ転送の組織は、次のような複雑なプロセスです。
-スウェーデン宇宙公社(スウェーデン宇宙公社)のアンテナのネットワーク。これにより、ナビゲーションシステムがBereshit装置に送信され、その軌道が追跡されます。
-Bereshit宇宙船を制御し、月に着陸した後、宇宙船から地球に科学データを転送するためのNASAの長距離通信ネットワーク(DSN)。
DSNは、電波望遠鏡のネットワークであり、深宇宙の宇宙船と通信するための多数の巨大なアンテナのシステムであり、パサデナ(カリフォルニア州)のNASAジェット推進研究所によって管理されています。月へ向かう途中のベレシットの作戦についてBereshit装置を使用した計画された操作の複合体の実装に関するビデオ:
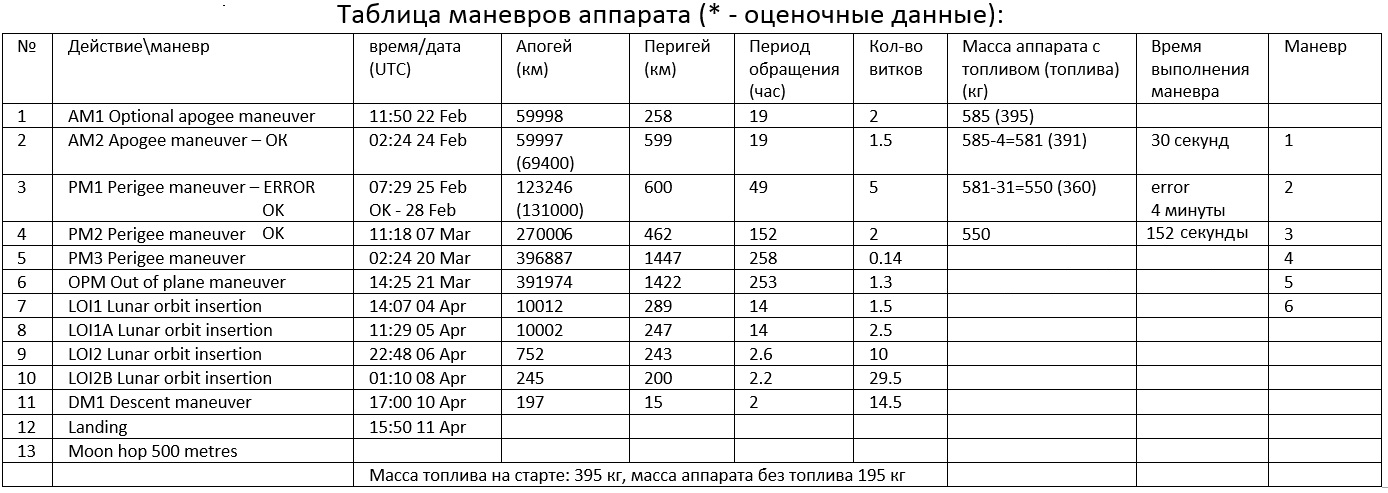
ここからの予備
データによると、Bereshit装置の宇宙機動の表を編集することが可能です。

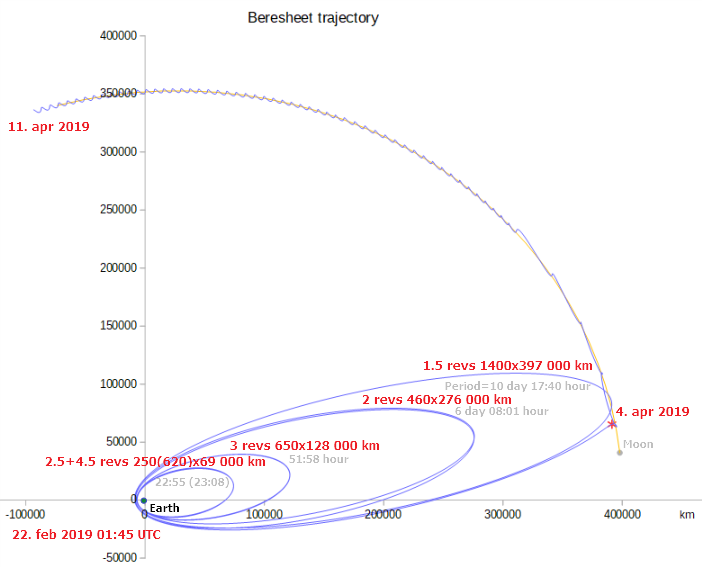
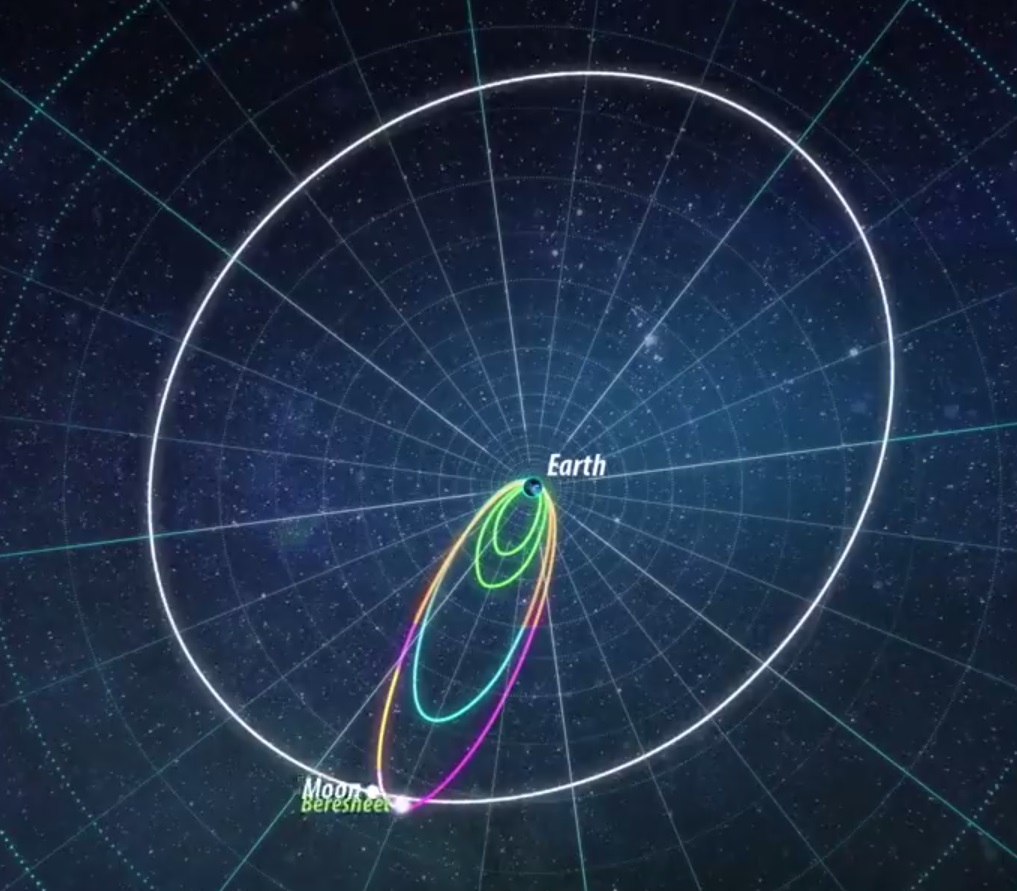
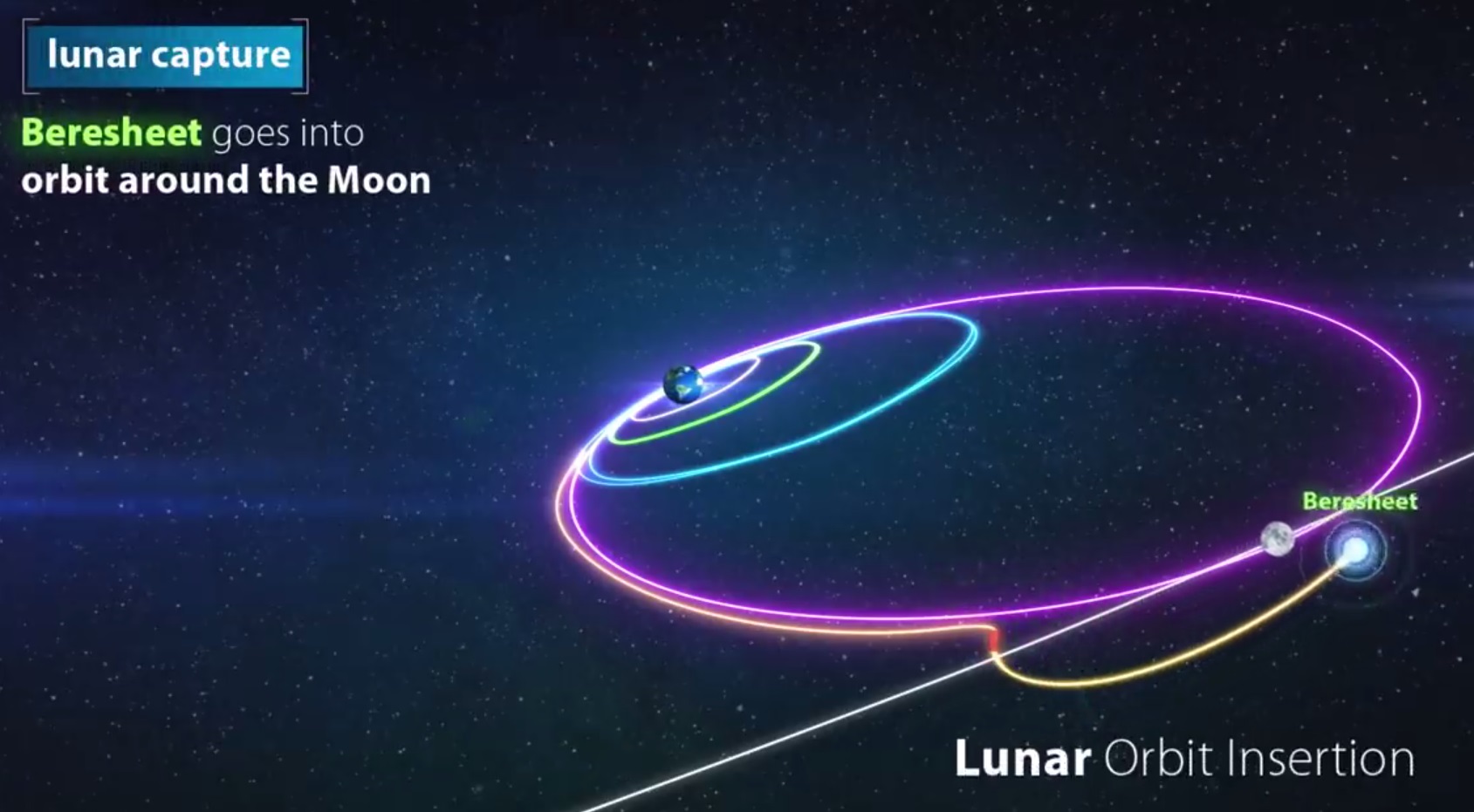
飛行の主な部分は、地球の周りの各軌道の後に楕円形の室内装飾の遠地点を増加させるための一連の操縦の実行です(数秒間または数分間エンジンをオンにします)。

SpaceILの説明でこの一連の操作がどのように見えるかを以下に示します。








Bereshit装置の計画された操作と現在のステータスデータに関する情報を分析して、次の
ようなテーブルをコンパイルできます 。
Bereshitミッションのステータスに関するレポートは、
イスラエルトゥザムーンTwitterチームSpaceILに掲載されています。
月旅行レポート#1月旅行レポート#2月旅行レポート月旅行レポート#4月旅行レポート#52019年3月7日、3回目の操縦が正常に完了しました。軌道は270,000 kmの遠地点で、152秒の加速のためにエンジンをオンにします。

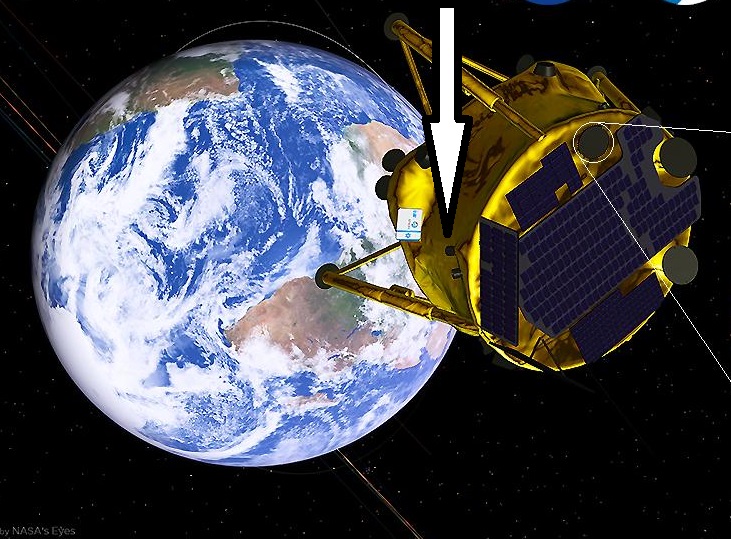
 デバイス「Bereshit」の月へのパス
デバイス「Bereshit」の月へのパスBereshit装置は、成功すると、ある種の記録を破ることになります。可能な限り長い軌道に沿って月に飛びます。
それで私にとっては面白くなりましたが、このデバイスは47日間で正確にどのくらいの距離(推定ではありますが、この任務の範囲を理解するにはまだ十分です)ですか?
メインデータについては、デバイスの操作のテーブルを使用し、その軌跡の評価テーブルを取得します。
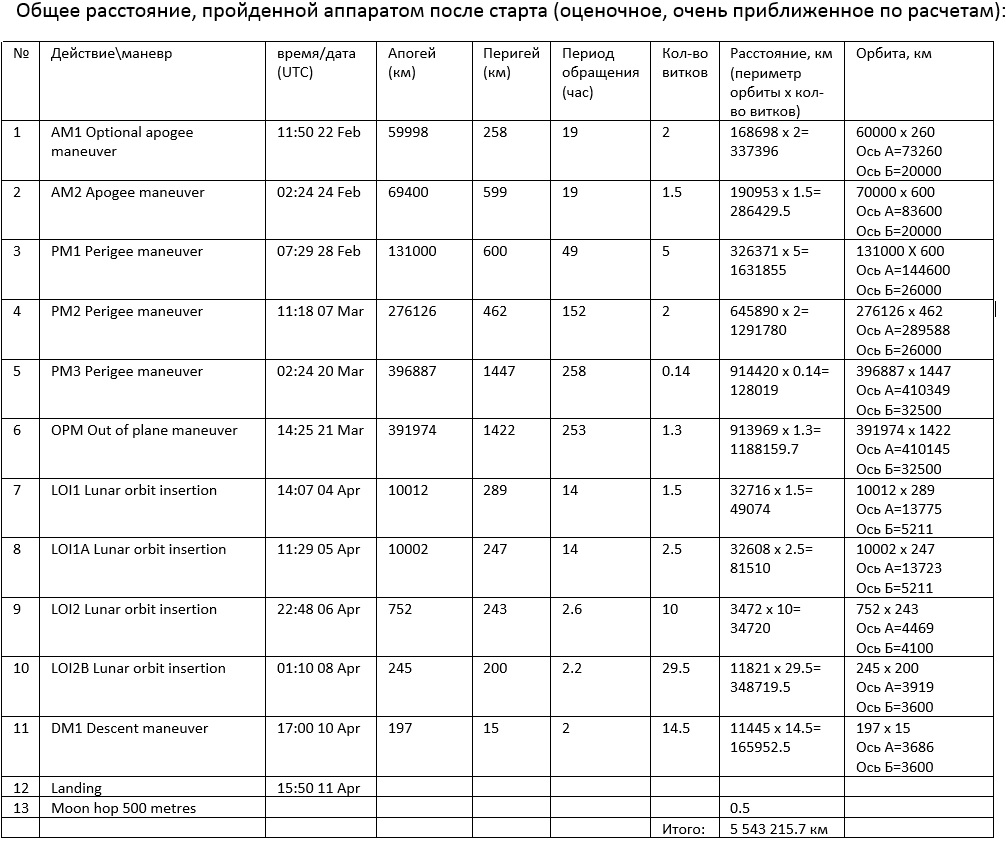
したがって、ベレシットは47日間で550万キロメートル以上飛行し、ミッションの最終地点である月面着陸に到達します。
平均速度は1354 m / sまたは4874.4 km \ hです。
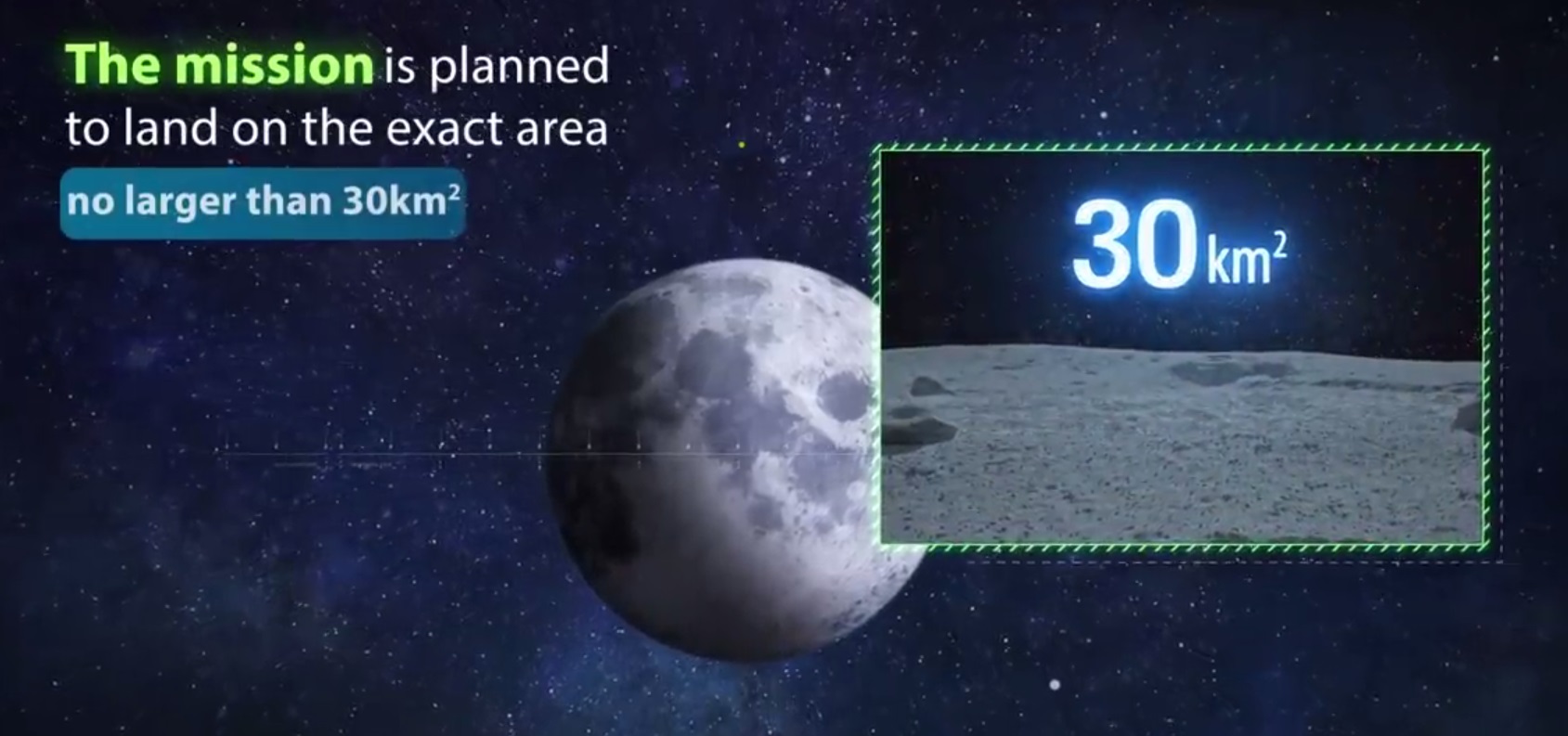
SpaceILによれば、その経路はさらに長く、650万キロメートルです!Bereshitデバイスの着陸地点推定によると、ベレシット装置は、アポロ17ミッションの宇宙飛行士が1972年12月11日に着陸した地域からそれほど遠くない、透明度の海として知られる暗い溶岩平原に2019年4月11日にソフト着陸する必要があります。
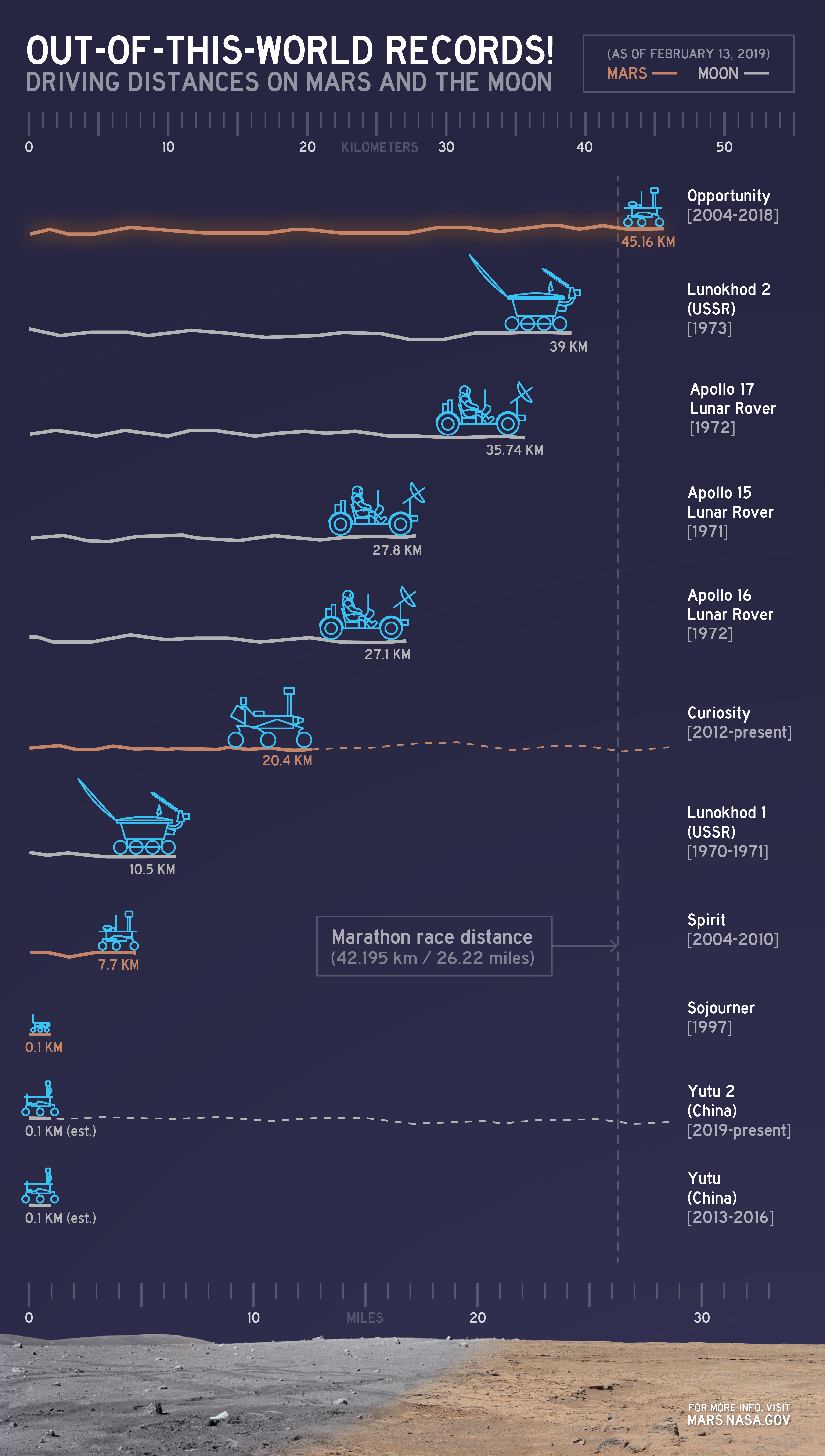
しかし、着陸後、以前に計画されていましたが(このアクションはSpaceILからの最近のレビューで発表されておらず、打ち上げ段階でキャンセルできます-実際には待機しています)、最大500メートルの距離への一種の追加の「ジャンプ」(十分な燃料がある場合)、月に沿って移動するための「月面ローバー標準」を満たし、おそらくローバーの間で月面の移動の長さに沿って8箇所のうち6箇所にすぐに登ります。
いずれにせよ、特にSpaceILではビデオに録画してしばらくしてパブリックドメインで表示することが約束されているため、ジャンプがなくても面白いランディングになります。
Bereshit装置の計画着陸エリア:



いずれにせよ、ジャンプが完了するかどうか、Bereshit装置は科学研究を開始し、月面のパノラマ高解像度画像をいくつか撮影することも計画されています。
Bereshitデバイスには熱保護および冷却システムがなく、月面での推定動作時間は約2地球日(最大3日間)であり、過熱のために電子機器が故障し、デバイスとの接続が失われ、新しい月になりますLunokhod-2(Luna-21ミッション)およびApollo 17ミッションモジュールの隣にある透明度の海の記念碑。