猿(チンパンジー)は、スティックを使用してシロアリからシロアリを取り出します。 2番目の写真では、ゴリラがスティックを使用して必要な草を収集しています。
猿(チンパンジー)は、スティックを使用してシロアリからシロアリを取り出します。 2番目の写真では、ゴリラがスティックを使用して必要な草を収集しています。米国の開発者は、
ロボット用の特別なアルゴリズムを作成し、ロボットが追加ツールを使用してタスクを完了することを可能にしました。 そして、それは比較的簡単です-特定の方法でオブジェクトをポイントAからポイントBに移動します。
アルゴリズムは2つの部分で構成されています。 1つ目は、ロボットがオブジェクトをランダムに移動して、一種の実験を実行できるようにします。 2番目の部分では、ニューラルネットワークを使用して特定のアクションの結果を評価することができます。 判明したように、アルゴリズムに従って動作するロボットは、トレーニングなしで補助ツールを効果的に使用しました。



人は毎日多くの追加ツールを使用します。 動物もこれを行うことができます-オウム、カラス、サル、およびその他の生物は、スティック、小石、およびとげを使用して、目的の目標を達成できます(たとえば、樹皮の下から甲虫の幼虫を抽出します)。
私たちにとって、パンのスライスにナイフを使用することは非常に明白です。 しかし、機械語の形式ですべてのアクションを説明する必要があるロボットの場合は、まったくそうではありません。
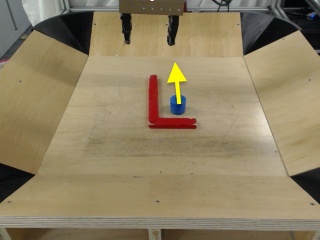
カリフォルニア大学バークレー校の科学者は、ロボットが特定の状況で補助ツールを使用し、その用途を決定するよう訓練する方法を開発しました。 アルゴリズムはタスクを「視覚化」し、ロボットにどの方向にサンプルを移動させるべきかを示します。 そして、すでにロボット(これは通常のロボットマニピュレーターです)がツールを取り、オブジェクトを移動します。 すべての動きはカメラで追跡されます。

このアルゴリズムは、ニューラルネットワークに基づいています。 特殊なプログラムは、ニューラルネットワークに「供給」されるロボットのさまざまなアクションシーケンスを計算します。 これにより、アクションの実行の結果として何が起こるかを示すビデオが生成されます。
マニピュレーターには、アクションを実行するコマンドが与えられます。 実際の結果が計画された結果と一致する場合、タスクがカウントされます。 作業の過程で、さまざまなビデオオプションがユーザーが提供する画像と比較され、タスクの最終結果が表示されます。 アクションの最適なシーケンスが見つかった後、ロボットは問題の解決に進みます。


このプロジェクトでは、
非デモ学習やシミュレーショントレーニングなどの機械学習アプローチを組み合わせています。 最初の場合、ロボットはオプションをランダムに選択します。 その結果、大量のデータのサンプルが生成され、最適な結果を得るのに役立ちます。 2番目のケースでは、開発者はロボットにツールをどのように使用するかを明確に示しました。 この状況では、参照ソリューションがカメラに記録され、ロボットはそのアクションの結果を比較します。
場合によっては、ロボットは、補助要素なしでタスクを完了することが最善であると「理解」し、それを実行します。 ロボットが以前に表示されていなくても、ツールはトレーニングなしで使用されます。