この記事は、A *アルゴリズムを使用した最も単純なパス検索を実装するAStarコンポーネントの説明です。 このアルゴリズムの実装には多くのソースコードがありますが、私が提案するコンポーネントは使いやすく、十分に文書化されています。 メソッドとプロパティの数が少ないにもかかわらず、このコンポーネントは非常に柔軟であり、多くの分野に適用できます(もちろん、ゲーム開発者は最も気に入っています)。 コンポーネントは、読者の希望とコメントに従ってさらに開発されます。 したがって、私はメールまたはコメントで私に書いてくれることに興味があるすべての人にお願いします。
コンポーネントファイルは次の場所にあります。
1)
depositfiles.com/files/ptsxof3p92)
ifolder.ru/14260428検索の本質検索を成功させるには、特定のエンティティが移動してパスを検索する平面を「タイル」に分割する必要があります
(図1を参照) 。 原則として、このようなフィールドに関する情報をオブジェクトの2次元配列に格納します。
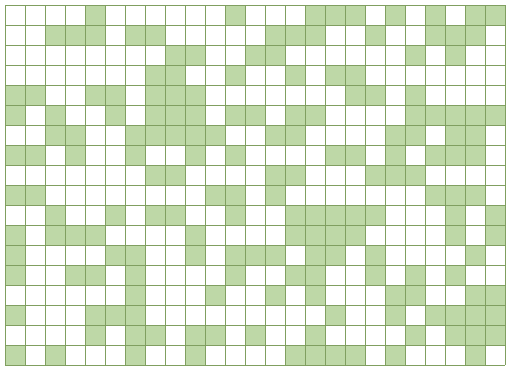
図1-「タイル」のフィールド(ペイントされたタイルは障害物です)
最も単純な場合の「タイル」を説明する各オブジェクト(今後は「タイル」ではなく「ノード」という用語に切り替えましょう)では、その座標が画面に保存され、このタイルが障害物かどうかのサインが保存されます。 原則として、これはブール式であり、
trueの場合、このノードは障害物であり、
falseの場合
、通過するフリーノードです。 コンポーネントを開発するときに、「
障害マップ 」という用語を作成しました;コンポーネントの動作を説明するのに役立ちます。 障害マップは、各ノードの開通性(ノードが障害であるかどうか)を特徴付けるブール式を格納する2次元配列です。 障害物マップに基づいて、コンポーネントはパスを検索します。
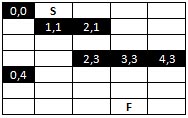
次に、最も単純な例を使用して障害物マップを作成し、コンポーネントのメソッドに進みましょう。 5 x 7のフィールドを作成し、一部のセルを通過できないようにする場合、次のようにします。
1)各ノードをfalseに設定して障害物マップを初期化します-通過する無料のノード
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .

2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .

3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)

5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .

6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .
var obstacle_map:Array=[];
for ( var i: int =0; i<5; i++) {
obstacle_map[i]=[];
for ( var j: int =0; j<5; j++) {
obstacle_map[i][j]= false ;
}
}
2) , true.
obstacle_map[0][0]= true ;
obstacle_map[1][1]= true ;
obstacle_map[2][1]= true ;
obstacle_map[2][3]= true ;
obstacle_map[3][3]= true ;
obstacle_map[4][3]= true ;
obstacle_map[0][4]= true ;
, 2 – .
2 –
, , AStar.
–
, , , :
var a_star:AStar= new AStar();
a_star a_star.ERROR:
a_star.addEventListener(a_star.ERROR,onError);
, . onError. , , :
private function onError(e:Event): void {
trace(a_star.lastError);
}
, a_star, lastError. – . 3 output . , , .
3 –
:
a_star.setObstacleMap(obstacle_map);
! AStar.ERROR AStar, . , . setObstacleMap - , lastError . , – , . , , .. , , , , AStar, .
Event.COMPLETE:
a_star.addEventListener(Event.COMPLETE,onComplete);
onComplete , clippingType ( ):
a_star.clippingType=<>
, : a_star.F ( full), a_star.P ( prevent) a_star.N ( none). a_star.N , . ? , . . 4 S (start) , f (finish) .
4 –
clippingType (. 5)
5. – clippingType=a_star.N .
5. – , . clippingType=a_star.P . : , ( , 3D ) , , . , «» , . 6, , – .
6 –
clippingType=a_star.P ( ) , . , , .
5. , – clippingType=a_star.F . .. .
, . , :
AStar.findPath(_startx:int,_starty:int,_targetx:int,_targety:int):void
{0,1} {6, 3}. findPath:
a_star.findPath(0,1,6,3);
, Event.COMPLETE (, ?), a_star . a_star my_path:Array:
private function onComplete(e:Event): void {
my_path=a_star.getPath();
}
, , . { _x: < >, _y: < >}. , 5.:
my_path=[
{_x:0,_y:1},
{_x:1,_y:0},
{_x:1,_y:2},
{_x:1,_y:3},
{_x:2,_y:4},
{_x:3,_y:5},
{_x:3,_y:6}
];
. , .