おそらく多くの人がこの車を知っています:
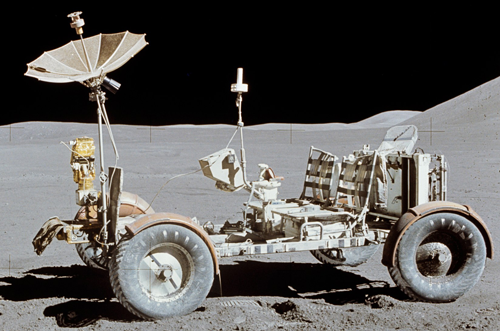

宇宙飛行士によって駆動されたこの月面自走車(Lunar Roving Vehicle、LRV)は、1969〜1971年にボーイングによって開発されました。 設計のために1900万ドルが割り当てられましたが、ボーイングの専門家はこの金額を満たすことができず、そのような最初のマシンのコストは3800万ドルでした。貨物のkg。 4つのモーターホイールを含むローバーシステムは、電圧36 V、容量120 Ahの2つの銀亜鉛電池で駆動されていました。 最大航続距離は65 kmでした。 月面ローバーの4つの車輪すべてが先行していました。 折りたたまれた月面車は、月キャビンの着陸段階にあります。 彼が占める体積は0.85立方メートルを超えません。
0.25馬力の電気モーターがハブに配置されました。 ギア比が80の機械式ギアボックス:1。 また、2つの独立した0.1 hpの電動モーターがありました。 -フロントとリア-ホイールを回すために、ギア比257:1のギアボックスと連動しました。 車輪は亜鉛メッキされたピアノ線で編まれ、グリップを向上させ、ワイヤーリムの摩耗を防ぐためにチタンプレートが装備されていました。 月面車は16 km / hの速度まで加速できますが、ほとんどの宇宙飛行士は9-10 km / hの速度で動きました。 高速すぎると、ローバーは「無傷の馬」に変わり、検出されない障害物にヒットするたびに恐ろしく立ち上がります。 月面車は操縦席の間にあるレバーで制御されていました。 さらに、すべての宇宙飛行士が月面探査機を操縦したかったという事実にもかかわらず、乗組員の司令官のみが制御を許可されました。 合計で4つのローバーの飛行モデルが作成されました。そのうち3つはアポロ15、16、17のミッション用で、もう1つは次の月のミッションの計画がキャンセルされた後のスペアパーツのソースとして使用されました。
遠征「アポロン-16」の間に、月の移動速度-18 km / hの記録が設定されました。
スキーム: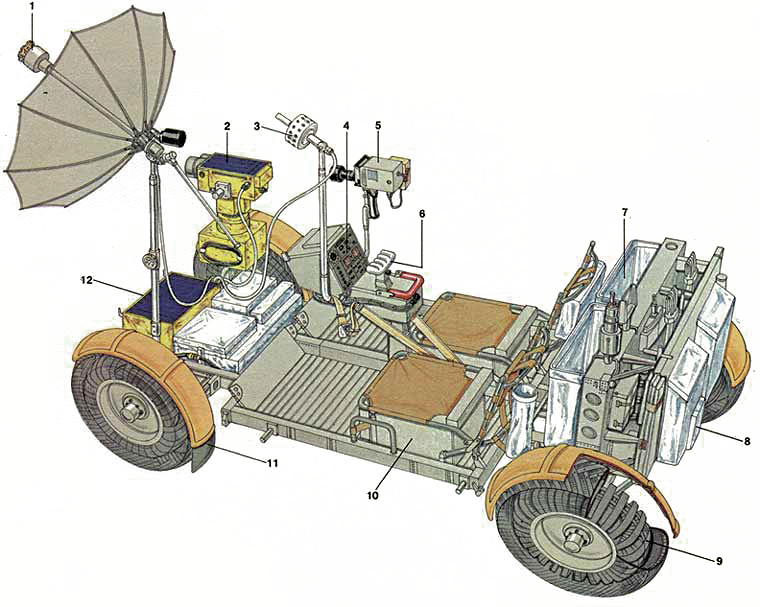
1無指向性アンテナ。
2台のテレビカメラ。
3単方向アンテナ。
4コントロールパネル。
5ムービーカメラ(16 mm)。
6コントロールノブ。
月サンプル用のコンテナ。
8機器およびツール。
9ワイヤーリム付きホイール。
座席の下に10個のコンテナ。
11ほこりからの保護。
12地球と直接通信するためのトランシーバー機器。
技術仕様長さ3.1 m。
トラックゲージ1.82 m。
ホイールベース2.3 m
ホイール直径81.3 cm。
地上高は35.5 cm、回転半径は3.05 mです。
最大速度は約18 km / hです。
月面探査車を稼働状態にする
モーターを備えた折り畳まれた月の「ジープ」は、月のキャビンの着陸ステップで上下逆さまに保管され、そこから宇宙飛行士は2本のナイロンケーブルを使用して取り出すことができます。
月面ローバーの展開は半自動です。
1月面着陸ステージのコンパートメントからルノホッドが取り除かれます。
2シャーシの後部が後ろに傾き、後輪が作業位置にロックされます。
3後輪が地面より低くなり、シャーシの前部が後ろに傾き、前輪が所定の位置にロックされます。
4宇宙飛行士は前輪を地面に降ろします。 これで、彼はシートとフットレストを取り付けることができます。
本「宇宙技術」から取ったスキーム