最初の部分では
、 Alan.Platformを使用してチェッカーのゲームのモデリングを開始しました。 要素ライブラリを作成し、そこに1つの要素、チェッカーの位置を制御する演算子を追加しました。 また、デザイナーの助けを借りて、プラットフォームの角に2つのピースを作成しました。 これはすべて、コンソールにテキスト形式で表示され、ObjectDumperによって親切にコンパイルされました。
ObjectDumperがどれほど優れていても、脳がキーと値のペアの間でドラフトボードを作成することは困難です。 したがって、モデルのグラフィカルな表現を作成する必要があります。 これは近い将来に行うことです。
GUIから、2つのことが必要です。 1つは、作成された世界のオブジェクトをウィンドウで表示して、そのプロパティを確認する機会です。 2番目は、これらのオブジェクトに作用し、プロパティを変更する機能です。 たまたま、生物のモデルから同じ能力が必要とされました。周囲のオブジェクトのプロパティを「感じる」ことができ、それらのプロパティを変更するアクションを実行できる必要があります。
つまり、グラフィカルインターフェイスの作成は、生物のモデリングに似ています。 そして、それは単に似ているだけではありません-同じクラスと原則が使用されます。 これを説明する最も簡単な方法は、次のチャートを使用することです。
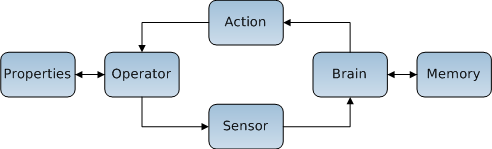
矢印は、情報が移動している方向を示します。 最初の部分で述べたように、情報は輪になっています。 オペレーターと脳は互いに相互作用します。 これにより、世界の状態(プロパティ)と脳(メモリ)が変化します。
この場合のアクションとセンサーは、この相互作用のメディエーター、メディエーターです。 彼らの主な仕事は、情報を一方が理解できる形式から他方が理解できる形式に変換することです。 オペレーターにとっては、これらはプロパティのセットであり、脳にとっては値の配列です。
アクション、センサー、および脳は、1つの本質であり、身体です。 Alan.Platformでは、生物はクラス-クライアントコンポーネントの派生物として実装されます。 さらに、一連のセンサー、アクション、および脳を含める機能が追加されました。
したがって、システムの場合、インターフェイスは通常の生物であり、特定の形状、位置、およびモデルオブジェクトが持つその他のプロパティを持っています。 彼自身もこれらのオブジェクトの1つです。 そして、私たちは皆、「目」で彼を見ることができ、彼の「手」でシステムと対話することができます。
だから、私たちの体はどの部分で構成されますか? 以前に作成されたCellBoardオペレーターに接続され、チェッカーの位置を確認し、この情報をウィンドウでの表示に適したものに変換できるセンサーが1つ必要です。 プラットフォーム上のチェッカーを移動するアクションも1つ必要です。 そして最後に、これらすべてを管理する脳が必要です。 彼はチェッカーを描画し、ユーザーアクションを処理するために注意をそらします。
かなり複雑に聞こえますが、適切な脳はすでにAlan.Platformにあります。 WPFを使用してオブジェクトをレンダリングします。 さらに、それ自体はFrameworkElementから継承されるため、ウィンドウに直接配置できます。
チュートリアル[「パート2」]
理論を身に付ければ、実用的な部分にスムーズに進むことができます。 Platform.ExplorerおよびElementsLibSampleプロジェクトをAlan.Platformから以前に作成したソリューションにコピーします。 Platform.Explorerをデフォルトで起動するプロジェクトにして、CellBoardを含む要素の以前に作成されたライブラリへのリンクを追加します。
センサーから始めましょう。 新しいUISensorクラスを要素ライブラリに追加します。
using System;
using System.Collections. Generic ;
using Platform.Core.Concrete;
using Platform.Core.Elements;
namespace Checkers
{
[AssociatedOperator( "Checkers.CellBoard" )]
[ChannelsCount(300)]
public class UISensor : Sensor
{
public override void Update( IEnumerable <PropertySet> elements)
{
throw new NotImplementedException();
}
public override void Transmit()
{
throw new NotImplementedException();
}
}
}
AssociatedOperatorは、センサーが操作できるオペレーターを示します。 演算子タイプのフルネームがコンストラクターに渡されます。 各センサーとアクションにはこの属性が必要です。
通常の状況では、ChannelsCountは脳に送信される値の数を示します。 しかし、インターフェイスの頭脳はあまり一般的ではなく、値を受け入れません。 属性から少なくともいくつかの利点を絞るために、スケールがコンストラクターに転送されました。 慣例により、すべてのプロパティ値の範囲は0〜1です。したがって、市松模様のボードのサイズは1x1です。 スケールを使用すると、ウィンドウでレンダリングするときのボードのサイズは300x300単位になります。
次に、抽象メソッドの実装があります。 Updateメソッドは抽象Mediatorクラスで宣言され、そこからSensorとActionが継承されます。 「視野」を実現するのに役立ちます。 センサーの場合、プロパティを表示できるオブジェクトのセットです。 アクションの場合、プロパティを変更できるオブジェクトのセット。 これらのオブジェクトは、VisibleElements保護フィールドに保存されます。 すべてのオブジェクトを表示する必要があるため、Updateメソッドの実装は次の形式を取ります。
public override void Update( IEnumerable <PropertySet> elements)
{
this .VisibleElements = elements;
}
このメソッドは、視野が変化するたびに、つまりオブジェクトの1つが移動するたびに、またプログラムの開始直後にオペレーターによって呼び出されます。 オペレーターが持っているすべてのプロパティのセットはメソッドに渡されるため、センサーはそれらから「見る」ものを選択します。
Transmitメソッドは、Sensorクラスで宣言されています。 そのタスクは、オブジェクトのプロパティに関する情報を脳に送信することであり、以前はそれを脳が理解できる形式に変換していました。 このメソッドは、プロパティ値が変更されたときにオペレーターによって呼び出されます。 したがって、脳は常に世界の状態に関する最新情報を持っています。
私たちの脳は、オブジェクトの描画方法に関する情報を受け取ることを期待しています。 このメカニズムは、DrawingVisualの単純なラッパーであるRenderInstructionsを使用します。 命令を受け取る3つの方法が脳で定義されています。
public void SetShape( int id, Shapes shape, double height, double width);
public void SetBrush( int id, Brush brush);
public void SetTransform( int id, Transform transform);
Idは、命令が示されているコンポーネントの識別子です。 脳では、RenderInstructionsオブジェクトが各IDに関連付けられています。 これらのメソッドのいずれかを呼び出すことにより、このオブジェクトのプロパティを変更し、再描画します。 これを行うには、対応するDrawingVisualオブジェクトのRenderOpen()メソッドがRenderInstructions内で呼び出されます。 オブジェクトをレンダリングするための新しいコンテキストが作成され、その後、WPFがウィンドウのコンテンツの更新を処理します。
ただし、これはすべて重要ではありません。 主なことは、3つのメソッドのいずれかを呼び出した後、すぐに画面に結果が表示されることを理解することです。
引数を使用すると、すべてが明確になります。 Shapesは列挙型であり、これまでのところ、楕円と長方形の2つの図形のみが含まれています。 サイズがあり、塗りつぶしがありますが、座標自体はありません。 チェッカーの移動ごとにDrawingContextを開いたり閉じたりしたくないでしょう。 したがって、移動はTranslateTransformを使用して実装されます。 最初は、すべてのチェッカーの中心は、宛先でブロードキャストされるポイント(0,0)にあります。 画面上でチェッカーを移動するには、対応するTranslateTransformオブジェクトのXおよびYプロパティの値を変更するだけです。 これらのプロパティはDependencyPropertyであるため、アニメーションを使用して変更できます。
レンダリングを理解したようで、その実装に進むことができます。 Transmitメソッドでは、TranslateTransformプロパティを変更する必要があります。 ただし、それらを変更する前に、この変換をRenderInstructionsに追加する必要があります。 そこで、他のすべての指示を追加する必要があります。 これは、プログラムの開始後に一度行う必要があります。
これに最も適切な場所は、すべての要素が実装するIConnectableインターフェイスで宣言されたConnectToメソッドです。 プログラムの開始直後に呼び出され、要素を接続するのに役立ちます。 したがって、初期化するのに適した場所です。
PresentationCore、PresentationFramework、WindowsBase、ElementsLibSampleプロジェクトへのリンクを要素ライブラリに追加します。
BaseUIBrain brain;
int scale;
public override void ConnectTo(Component parent)
{
base .ConnectTo(parent);
this .brain = this .ConnectedBrain as BaseUIBrain;
this .scale = Sensor.GetChannelsCount( this .GetType());
this .brain.Scale = scale; // .
var checkerBrush = Brushes.BurlyWood;
double diameter = 0.12 * scale; // .
// Update ,
// VisibleElements .
foreach ( var checker in this .VisibleElements)
{
// .
double x = checker[ "X" ].Value * scale;
double y = checker[ "Y" ].Value * scale;
var translate = new TranslateTransform(x, y);
brain.SetShape(checker.Id, Shapes.Ellipse, diameter, diameter);
brain.SetBrush(checker.Id, checkerBrush);
brain.SetTransform(checker.Id, translate);
}
}
これで、画面に大事な円が表示されます。 Platform.Explorerは、モデル構成をworld.xmlファイルに保存します。 開いて、その内容を次のものに置き換えます。
<? xml version ="1.0" ? >
< component xmlns ="http://alan.codeplex.com/constructor/world" >
< operator name ="Checkers.CellBoard" />
< component >
< propertySet name ="Checker" operator ="Checkers.CellBoard" >
< property name ="X" value ="0.0625" />
< property name ="Y" value ="0.6875" />
</ propertySet >
</ component >
< component >
< propertySet name ="Checker" operator ="Checkers.CellBoard" >
< property name ="X" value ="0.0625" />
< property name ="Y" value ="0.9375" />
</ propertySet >
</ component >
< client >
< propertySet name ="Checker" operator ="Checkers.CellBoard" >
< property name ="X" value ="0.1875" />
< property name ="Y" value ="0.8125" />
</ propertySet >
< sensor name ="Checkers.UISensor" />
< brain name ="ElementsLibSample.UIElements.BaseUIBrain" />
</ client >
</ component >
したがって、3つのチェッカーを作成しますが、そのうちの1つはボディインターフェイスです。 これで実行できます。 結果は次のとおりです。
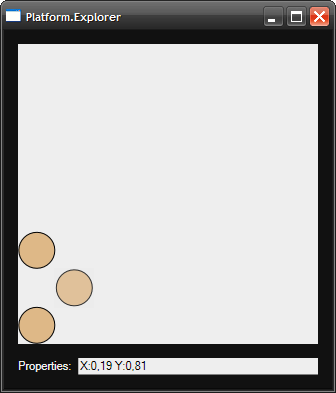
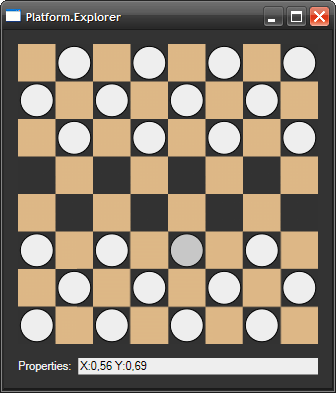
BaseUIBrainはオブジェクト選択をサポートします。 チェッカーのいずれかをクリックすると、下にそのすべてのプロパティの値が表示されます(値は丸められます)。 XAMLとworld.xmlを少し調整することで、次の結果を得ることができます。
だから、センサーは、脳です。 アクションは残ります。 新しいMoveCheckerクラスを要素ライブラリに追加します。
using System;
using System.Linq;
using System.Collections. Generic ;
using Platform.Core.Concrete;
namespace Checkers
{
[AssociatedOperator( "Checkers.CellBoard" )]
[ChannelsCount(3)]
public class MoveChecker : Platform.Core.Elements.Action
{
public override void Update( IEnumerable <PropertySet> elements)
{
this .VisibleElements = elements;
}
public override void DoAction( params double [] args)
{
throw new NotImplementedException();
}
}
}
ActionクラスはSensorに非常に似ていますが、Transmitメソッドの代わりに、DoActionがあります。これは、脳からdouble値の配列を受け取ります。 センサーがオブジェクトのプロパティを取得し、それらからデータセットを作成した場合、アクションには逆の問題があります。データセットを使用して、必要なオブジェクトを見つけ、プロパティを変更する必要があります。
私たちの行動には3つの議論で十分です。 最初に移動する必要があるチェッカーのIDがあり、2番目に「X」座標を変更する必要がある値、3番目に「Y」座標を変更する必要がある値があります。
プロパティの変更を担当するAlan.Platformの部分は、プラットフォームの内部時間に密接に関連していますが、これについてはまだ言及していません。 内部時間は対策として実装されます。 時間管理センターは、静的なPlatform.Core.Concrete.Timeクラスです。
アイデアは、状態が時間に依存する可能性のあるオブジェクトがあるということです。 これらのオブジェクトは、Timeクラスに登録されます。 次に、ユーザーがTime.Tick()メソッドを呼び出すと、登録されているすべてのオブジェクトで同様のメソッドが呼び出されます。 開発者はこのメソッドをオーバーライドできます。 これらのオブジェクトはTimeObjectと呼ばれ、PropertySetはその1つです。
PropertySetを使用すると、プロパティの変更を次のように計画できます。
propertySet[ "PropertyName" ][ticks] = delta;
ここで、ticksは値をプロパティに追加するための目盛りの数であり、deltaはこの値です。 例:
checker[ "Y" ][1] = 0.125;
この行は、次のメジャーで「Y」プロパティに0.125を追加することを意味します。 変更を計画できるメジャーの最小数は1、最大は10です(現時点では)。 つまり、値を即座に変更することはできません。
新しいプロパティ値ではなくデルタが使用される理由は簡単です-サイクルごとに複数のデルタをスケジュールできます。 そして、それらが適用される順序に関係なく、最終結果は同じままです(算術の単純な規則)。
これで、DoActionの実装を開始できます。
public override void DoAction( params double [] args)
{
var checker = this .VisibleElements.First(x => x.Id == args[0]);
checker[ "X" ][1] = args[1];
checker[ "Y" ][1] = args[2];
}
これで、アクションの準備が整い、world.xmlに追加できます。
...
</ propertySet >
< action name ="Checkers.MoveChecker" />
< sensor name ="Checkers.UISensor" />
< brain name ="ElementsLibSample.UIElements.BaseUIBrain" />
</ client >
...
今すぐPlatform.Explorerを起動した場合、DoActionメソッドはどこからも呼び出されないため、変更は表示されません。 この誤解を修正します。 これを行うには、以前使用したBaseUIBrainから派生した新しいUIBrainクラスを要素ライブラリに追加します。
using ElementsLibSample.UIElements;
namespace Checkers
{
public class UIBrain : BaseUIBrain
{
}
}
UIBrainは、ユーザーアクションに応じて必要なパラメーターを使用してDoActionメソッドを呼び出す必要があります。 これをハングアップする最も簡単な方法は、KeyDownイベント-キーボードのキーを押すことです。 まず、このイベントのハンドラーを追加します。 これは、ConnectToメソッドで実行できます。
public override void ConnectTo(Decorator parent)
{
base .ConnectTo(parent);
this .KeyDown += UIBrain_KeyDown;
}
このトリッキーなConnectToメソッドは、IConnectableではなくBaseUIBrainで定義されています。 BaseUIBrainには2つの親があります。 1つは世界モデルツリーのクライアントであり、もう1つはWPF世界の境界線です。 何らかの方法で、このメソッドでUIBrainの初期化を行うことができます。
UIBrain_KeyDownハンドラーは非常に単純です。
void UIBrain_KeyDown( object sender, KeyEventArgs e)
{
if ( this .selectedId != 0)
{
var moveChecker = this .actions[ "Checkers.MoveChecker" ];
switch (e.Key)
{
case Key.Q:
moveChecker.DoAction(selectedId, -0.125, -0.125);
break ;
case Key.W:
moveChecker.DoAction(selectedId, 0.125, -0.125);
break ;
case Key.S:
moveChecker.DoAction(selectedId, 0.125, 0.125);
break ;
case Key.A:
moveChecker.DoAction(selectedId, -0.125, 0.125);
break ;
}
Time.Tick();
OnChanged(selectedId);
}
}
まず、チェッカーが強調表示されているかどうかを確認します。 その場合、selectedIdにはそのインデックスが含まれます。 次に、アクションを見つけます。 次に、どのキーが押されたかを分析します。 「Q」の場合-選択したチェッカーを上下に移動し、「W」の場合-上下、「S」-上下、「A」-上下に移動します。 その後、1小節をカウントします。
Tickメソッドは、すべてのサブスクライバーがこのイベントを処理する場合にのみ制御を返します。 つまり、次のメジャーで計画されているプロパティの変更が適用されます。 最後に、OnChangedメソッドが呼び出され、ウィンドウの下部にあるプロパティ情報が更新されます。 メジャーは、いずれかのキーを押すとカウントされます。
UIBrainの準備ができました。 BaseUIBrainの代わりにworld.xmlで指定するだけで、実行できます... CellBoard.ValidatePropertySetの実装を忘れたため、起動に失敗します。 このメソッドは、セット内のプロパティ値を変更した直後に呼び出されます。 その中で世界の法則が実現します。 Operatorクラスでの彼の宣言は次のようになります。
public abstract bool ValidatePropertySet(PropertySet ps);
唯一のパラメーターは、新しい状態を確認して結果を返す必要があるプロパティのセットです-この条件は有効ですか? そうでない場合、以前の状態へのロールバックが発生します。つまり、プロパティに対する計画された変更は適用されません。 ドラフトにはかなりの数の法律があるため、今のところは、「return true」スタブを代わりに置き、プログラムを再度実行してみてください...
UISensor.Transmitも実装するのを忘れたため、再起動は成功しません。 ここで、TranslateTransformオブジェクトのプロパティを変更する必要があります。
public override void Transmit()
{
foreach ( var element in VisibleElements)
{
var translate = brain.GetTransform<TranslateTransform>(
element.Id);
translate.X = element[ "X" ].Value * scale;
translate.Y = element[ "Y" ].Value * scale;
}
}
さて、今では間違いなく開始されます! ツリーをノックして、[実行... Urrraa!]をクリックします。 すべてのチェッカーが同じ色であるという事実に混乱していない場合は、1つまたは2つのパトリアをプレイできます。
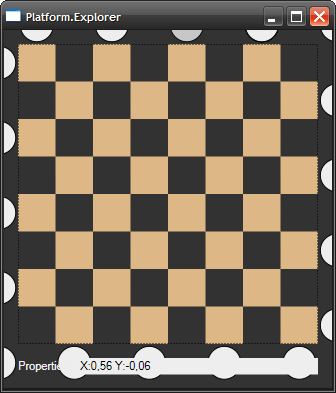
もちろん、いくつかの欠陥があります。 たとえば、ノックダウンされたピースを削除することはできません。ウィンドウの外に移動することしかできません。 Alan.Platformでは、オブジェクトの削除と追加はまだサポートされていません。 チェッカーは前後に移動でき、さらに重ねることもできます。 原則として、これは修正できます-CellBoard.ValidatePropertySetに適切なコードを追加するだけで、同様のチェッカー状態が拒否されます。 チェッカーに色を追加したり、「lady-not lady」状態を追加することもできます。 これはすべて、別のオペレーターを追加し、センサーとアクションをそれに接続することで実行できます。
これでチュートリアルは終了です。 その中で、24個のチェッカーが住む世界のモデルを作成しました。そのうちの1つは生物インターフェースです。 最終結果のアーカイブは
ここからダウンロードでき
ます 。
一般に、モデルをWPFにバインドする必要はありません。 類推により、生物の形で新しいコマンドラインインターフェイスを作成し、他のチェッカーに追加することは非常に可能です。 生物をモデルにまったく追加することはできませんが、その状態は誰にも見えず、誰も変化しません。
最後に、質問に答えたいと思います-Alan.Platformとは何ですか? これにより、サービスコード、オブジェクトの作成とリンク、オブジェクトを最新の状態に保つことなどを忘れることができます。座ってモデリングを行うことができます。
PS実行時にオブジェクトを作成するというこのような考え方は、冗長で複雑で不便だと思われるかもしれません。 ORMシステムでの分割方法と同様のプロパティを持つ、強く型付けされたオブジェクトを作成する方がはるかに簡単で理解しやすいでしょう。 一方では、OOPのすべての魅力を使用できるため、オブジェクトの作成が簡単になります。 一方、これは世界の法則の創造と脳と物体との相互作用を複雑にします。
- Reflection APIを使用しても、アナログ演算子を作成することはできません。
- 世界の法則は、オブジェクト自体に埋め込まれる必要があります。
- 継承ツリーは常に成長します。
- 合成は、オブジェクトを作成するプロセスを複雑にする可能性があります。
- センサーとアクションの類似体は、すべてのタイプのオブジェクトを知るか、Reflection APIを使用する必要があります。
最初は、同様のシステムを構築しようとして、これらの問題に遭遇しました。 このようにモデル化された世界を拡大し複雑にすることは非常に困難です。 センサーとアクションの実装も非常に困難です。 ほぼ同時期に、センサーとアクションはオブジェクトを実際に必要とせず、プロパティのみを必要とすることが明らかになりました。 ここから、オペレーターとのアイデアが生まれました。 次に何が起こったか、あなたはすでに知っています。
プロジェクトに参加したい、またはプロジェクトを使用して何かを作成したい場合は、LANに連絡するか、ジャバーをノックしてください。
openminded@xdsl.by